

授权公布号:CN109986560B
一种面向多目标种类的机械臂自适应抓取方法
有效
申请
2019-03-19
申请公布
2019-07-09
授权
2023-02-14
预估到期
2039-03-19
| 申请号 | CN201910206721.0 |
| 申请日 | 2019-03-19 |
| 申请公布号 | CN109986560A |
| 申请公布日 | 2019-07-09 |
| 授权公布号 | CN109986560B |
| 授权公告日 | 2023-02-14 |
| 分类号 | B25J9/16 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 埃夫特智能装备股份有限公司 |
| 申请人地址 | 安徽省芜湖市鸠江经济开发区万春东路96号 |
专利法律状态
2023-02-14
授权
状态信息
授权
2019-07-09
公布
状态信息
公布
摘要
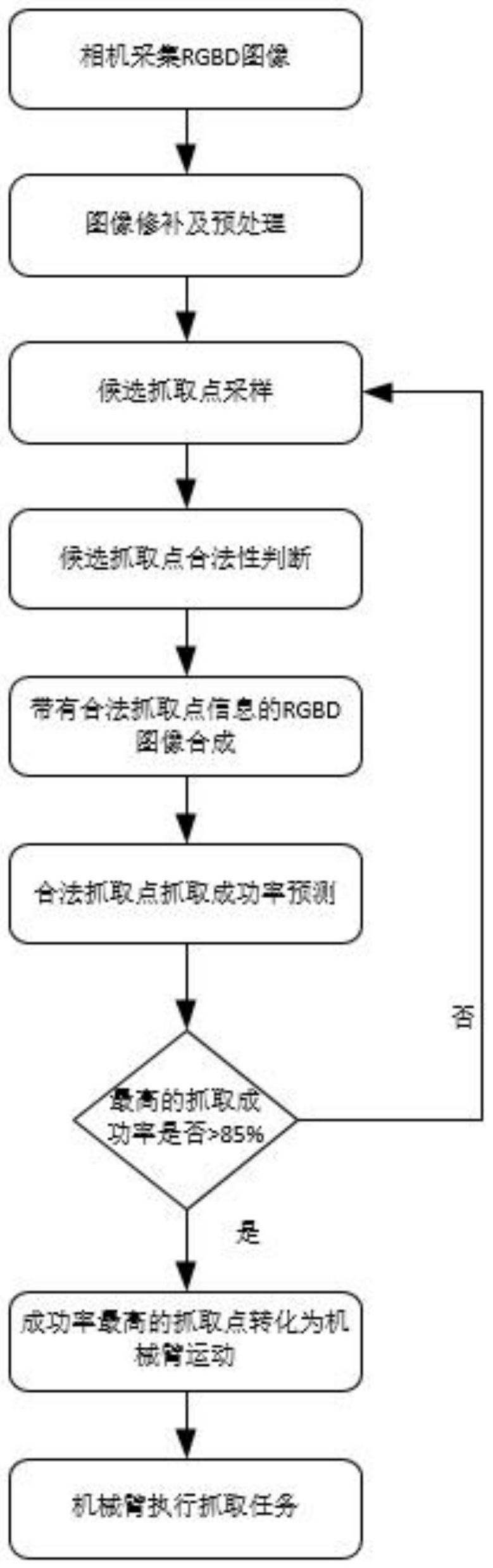
本发明涉及一种面向多目标种类的机械臂自适应抓取方法,本方法在现有技术的基础上,先通过候选抓取点随机采样并判断其合法性,然后带有合法抓取点信息的RGBD图像,再使用构建好的抓取成功率预测神经网络对各个合法抓取点的抓取成功率进行预测,选择抓取成功率最高且不低于85%的抓取点,最后通过机械臂带动夹爪进行抓取;该方法避免了反复训练神经网络或人工调整阈值,能够自适应的抓取大部分重量适中,夹具形状能够适配的物体;不仅显著增加了机器人抓取系统在待抓取目标种类较多,变更较快的场景中的适应能力;而且与现有技术相比,本方法还能够大幅降低使用者在使用过程中的调试和更改成本。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有