

授权公布号:CN113021414B
一种工业机器人末端抖动程度测量评价方法
有效
申请
2021-02-24
申请公布
2021-06-25
授权
2022-04-08
预估到期
2041-02-24
| 申请号 | CN202110208826.7 |
| 申请日 | 2021-02-24 |
| 申请公布号 | CN113021414A |
| 申请公布日 | 2021-06-25 |
| 授权公布号 | CN113021414B |
| 授权公告日 | 2022-04-08 |
| 分类号 | B25J19/00 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 埃夫特智能装备股份有限公司 |
| 申请人地址 | 安徽省芜湖市鸠江经济开发区万春东路96号 |
专利法律状态
2022-04-08
授权
状态信息
授权
2021-06-25
公布
状态信息
公布
摘要
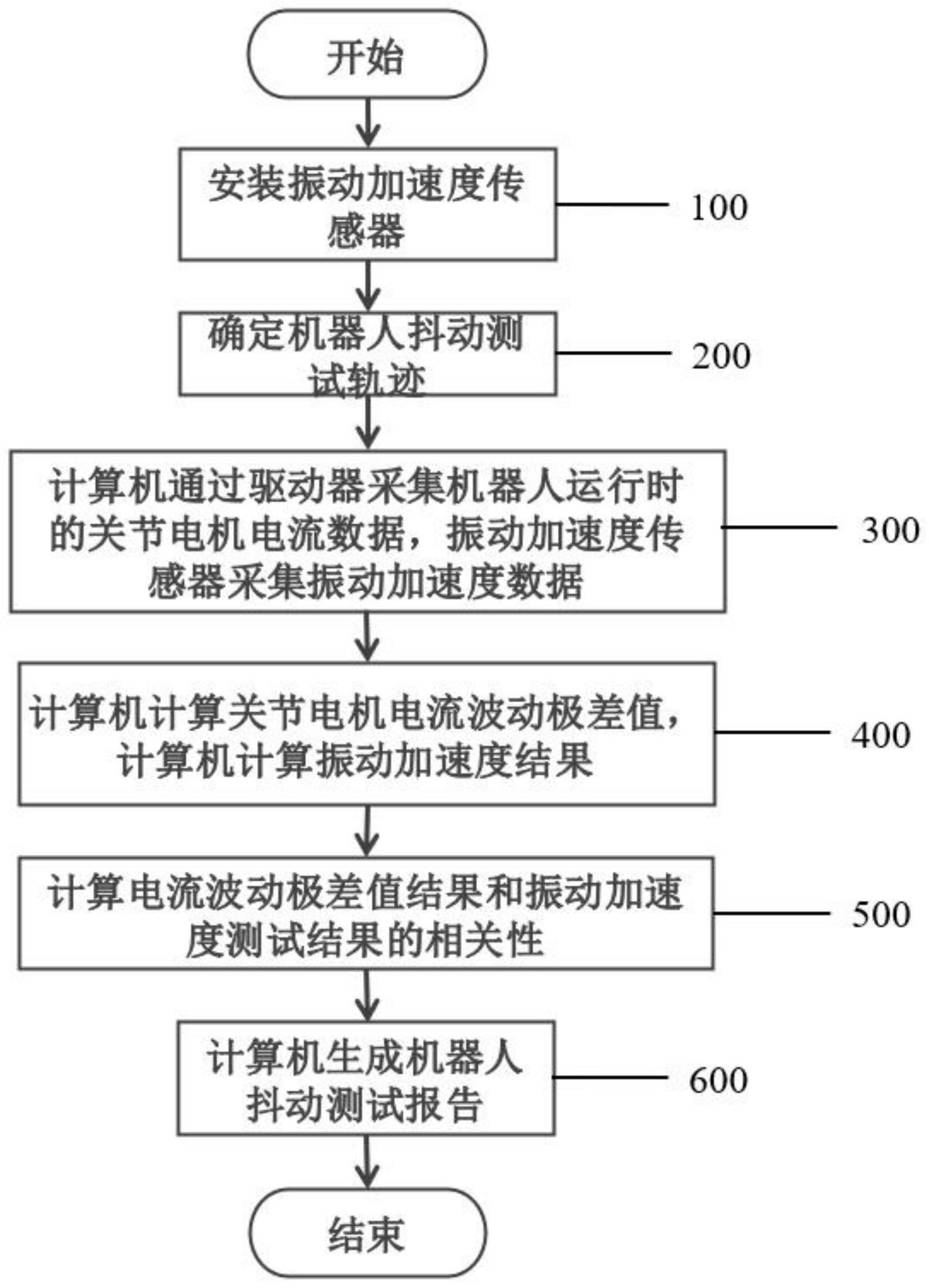
本发明涉及机器人性能测试技术领域,具体是一种工业机器人末端抖动程度测量评价方法,其具体步骤如下:S100、安装振动加速度传感器;S200、确定机器人抖动测试轨迹;S300、计算机通过驱动器采集机器人运行时的关节电机电流数据,振动加速度传感器采集振动加速度数据;S400、计算机计算关节电机电流波动极差值,计算机计算振动加速度结果;S500、计算电流波动极差值结果和振动加速度测试结果的相关性;S600、计算机生成机器人抖动测试报告,通过振动加速度传感器将现有的机器人抖动的主观评价变成客观的定量测量,可以定量测量和描述机器人抖动程度,且采集简便,测量时间短,设备成本低廉,人员要求低。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有