

授权公布号:CN211916872U
一种用于抓取、装配内存条的机器人抓手
有效
申请
2020-09-08
申请公布
1970-01-01
授权
2020-11-13
预估到期
2030-09-08
| 申请号 | CN202021935747.3 |
| 申请日 | 2020-09-08 |
| 授权公布号 | CN211916872U |
| 授权公告日 | 2020-11-13 |
| 分类号 | B25J15/00 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 川崎机器人(天津)有限公司 |
| 申请人地址 | 天津市滨海新区经济技术开发区新环西路19号6号楼一、二层 |
专利法律状态
2020-11-13
授权
状态信息
授权
摘要
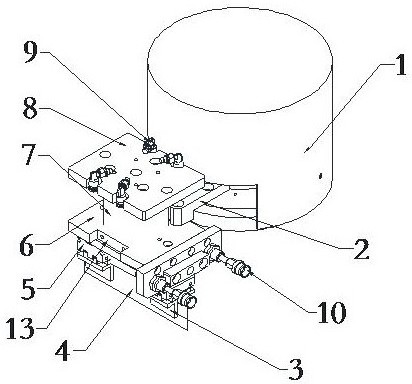
本实用新型公开了用于抓取、装配内存条的机器人抓手,包括:与外部的机器人连接的安装基板、设置在安装基板一侧的相机、安装在安装基板下方的吸盘机构和抓取机构;安装基板的底部设有与吸盘机构连接的连接轴,连接轴的一侧设有连接块,连接块与相机固装;吸盘机构包括支撑板和多个吸盘,支撑板的顶部与连接轴固装,多个吸盘安装在支撑板的端部;抓取机构包括安装板、夹紧气缸和受夹紧气缸驱动的夹爪,夹紧气缸安装在安装板的底部,夹爪与夹紧气缸的输出端连接。通过相机对内存条拍照定位上料工位上的内存条的位置,吸盘吸住水平状态的内存条,机器人驱动内存条抓手旋转,夹爪夹取直立状态的内存条,并插装至内存条的插座内,无需人工插装内存条。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有