

授权公布号:CN215497490U
机器人用电子产品柔性线穿线抓手
有效
申请
2021-11-25
申请公布
1970-01-01
授权
2022-01-11
预估到期
2031-11-25
| 申请号 | CN202122915538.3 |
| 申请日 | 2021-11-25 |
| 授权公布号 | CN215497490U |
| 授权公告日 | 2022-01-11 |
| 分类号 | H01R43/05;H01R43/052;H01R43/048 |
| 分类 | 基本电气元件; |
| 申请人名称 | 川崎机器人(天津)有限公司 |
| 申请人地址 | 天津市滨海新区经济技术开发区信环西路19号6号楼6101/6201/6202/6203 |
专利法律状态
2022-01-11
授权
状态信息
授权
摘要
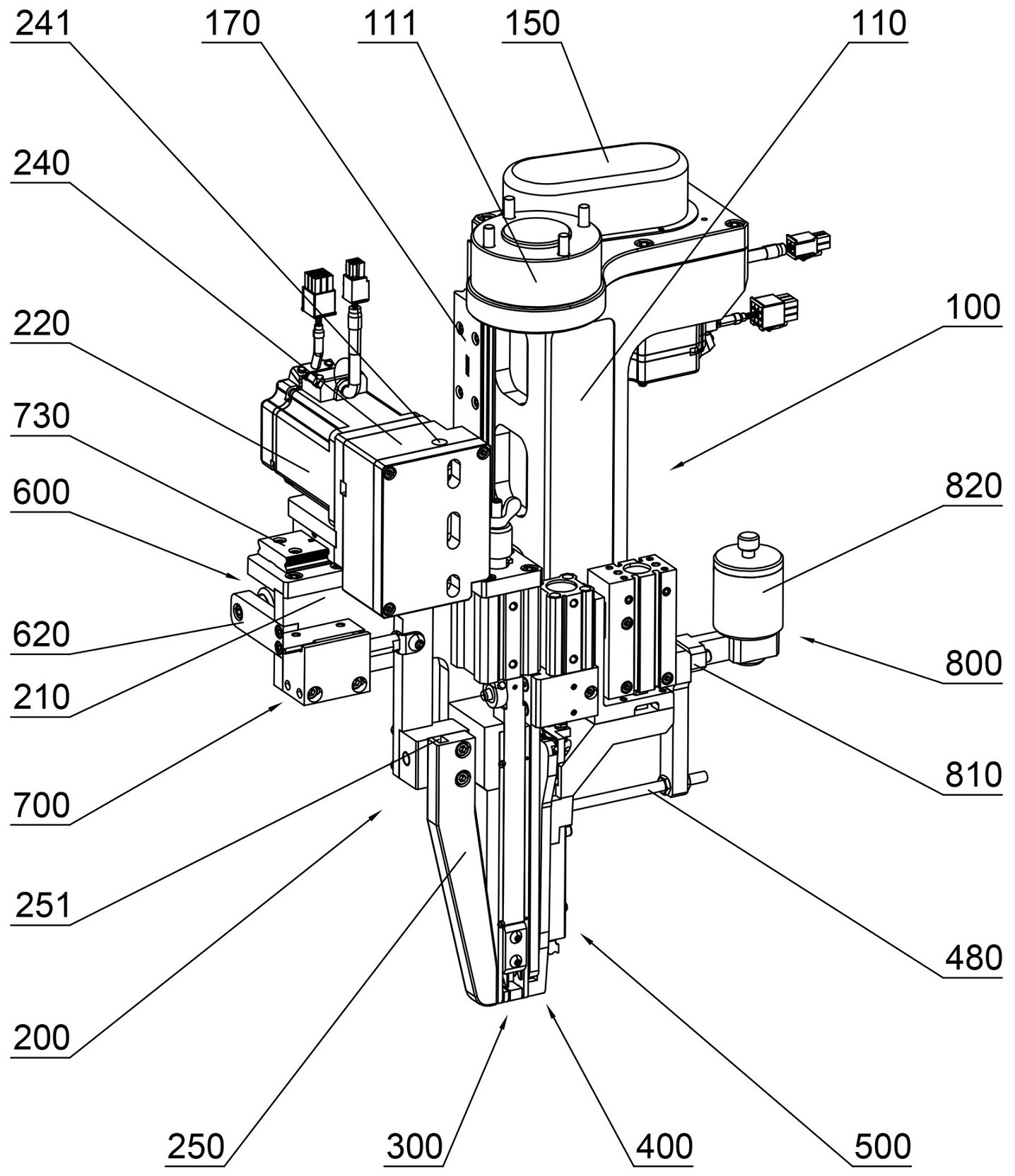
本实用新型公开了机器人用电子产品柔性线穿线抓手,包括主体支撑机构、送料机构、剪线机构、夹紧机构和下压机构,送料机构、剪线机构、夹紧机构和下压机构沿线缆的送料方向依次设置。主体支撑机构包括主体支架,主体支架上滑动设置有升降座。送料机构包括送料支架、送料电机、送料连接板、齿轮组引线器。剪线机构包括剪线纵向气缸、剪线竖板、剪线连接块、剪线引导板。夹紧机构包括夹紧支座、夹紧支撑板、夹紧钳、夹紧纵向气缸。本实用新型可以自动完成线缆的送料、剥线、插线作业,自动化程度高,送线和剥线误差小、精度高,具备较高的工艺可靠性,同时具有较高的运行节拍,机械结构简单,布局紧凑,并且利于维护保养。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有