

授权公布号:CN215467661U
大型冲压机间搬运用机器人伺服滑动抓手
有效
申请
2021-11-25
申请公布
1970-01-01
授权
2022-01-11
预估到期
2031-11-25
| 申请号 | CN202122913724.3 |
| 申请日 | 2021-11-25 |
| 授权公布号 | CN215467661U |
| 授权公告日 | 2022-01-11 |
| 分类号 | B21D43/18;B25J9/02;B25J9/12 |
| 分类 | 基本上无切削的金属机械加工;金属冲压; |
| 申请人名称 | 川崎机器人(天津)有限公司 |
| 申请人地址 | 天津市滨海新区经济技术开发区信环西路19号6号楼6101/6201/6202/6203 |
专利法律状态
2022-01-11
授权
状态信息
授权
摘要
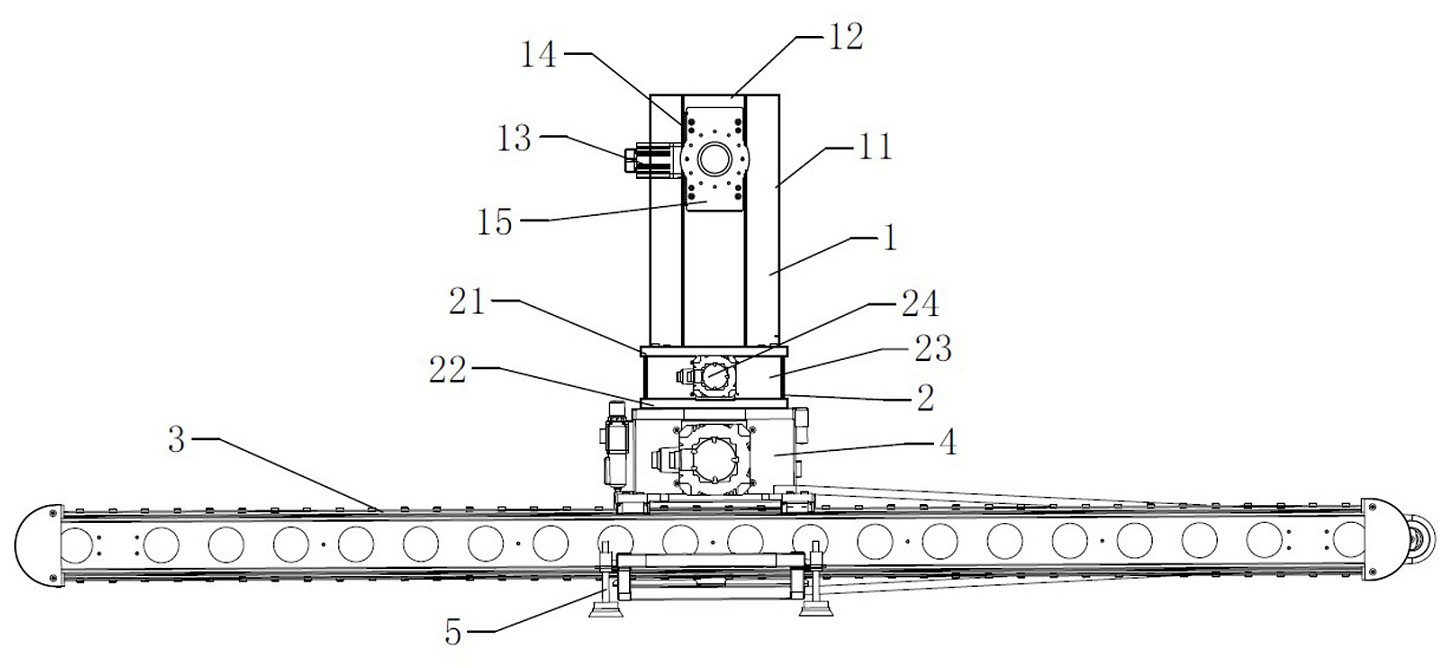
本实用新型公开了大型冲压机间搬运用机器人伺服滑动抓手,包括主体框架、驱动装置总成、升降装置、旋转座及端拾器总成。升降装置包括纵向导轨、升降柱、第一电机及纵向传动件。旋转座包括上旋座、下旋座、圆周传动件及第二电机,上旋座的顶部安装在升降柱的底部。驱动装置总成的顶部安装在下旋座底部。主体框架包括主体纵梁、上导轨及下导轨,上导轨安装在主体纵梁顶部,下导轨安装在主体纵梁底部,驱动装置总成的底部滑动安装在上导轨上,端拾器总成滑动安装在下导轨上。本实用新型实现了滑动抓手在X、Y、Z轴方向的运行,提高了滑动抓手的灵活度,适合相对复杂的工作环境,提高了生产效率。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有