

授权公布号:CN211758129U
一种机器人用滑动夹具
有效
申请
2020-09-07
申请公布
1970-01-01
授权
2020-10-27
预估到期
2030-09-07
| 申请号 | CN202021922779.X |
| 申请日 | 2020-09-07 |
| 授权公布号 | CN211758129U |
| 授权公告日 | 2020-10-27 |
| 分类号 | B21D43/18 |
| 分类 | 基本上无切削的金属机械加工;金属冲压; |
| 申请人名称 | 川崎机器人(天津)有限公司 |
| 申请人地址 | 天津市滨海新区经济技术开发区新环西路19号6号楼一、二层 |
专利法律状态
2020-10-27
授权
状态信息
授权
摘要
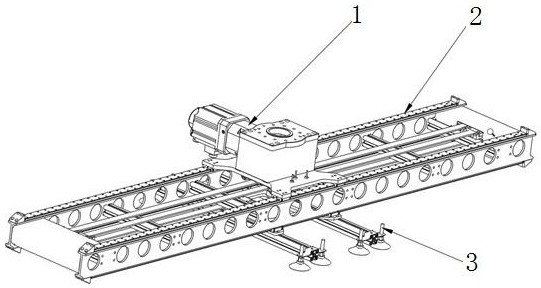
本实用新型公开了一种机器人用滑动夹具,包括驱动机构、受驱动的用于与驱动机构产生相对滑动的支撑架和受驱动的在支撑架上滑动的用于抓取工件的夹爪机构,驱动机构安装在上导轨上,夹爪机构滑动安装在下导轨上,驱动皮带绕过驱动机构内部并通过驱动皮带压板与夹爪机构连接,传送皮带绕过驱动机构内部并通过传送皮带压板与支撑架连接。驱动机构通过安装基板与外部的机器人固装,位置固定,伺服电机驱动传送皮带和驱动皮带传动,与传统的机器人使用相同的驱动电机的相同速度情况下,夹爪机构与支撑架同时同向运动,且夹爪机构可以在支撑架上滑动,夹爪机构在有限距离的导轨上滑动以使夹爪机构的运行速度翻倍,提高了机器人的运行速率,生产效率高。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有