

授权公布号:CN216505187U
一种码垛用工业机器人复合夹具
有效
申请
2021-12-21
申请公布
1970-01-01
授权
2022-05-13
预估到期
2031-12-21
| 申请号 | CN202123229316.2 |
| 申请日 | 2021-12-21 |
| 授权公布号 | CN216505187U |
| 授权公告日 | 2022-05-13 |
| 分类号 | B25J15/00;B25J15/02;B65G61/00 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 川崎机器人(天津)有限公司 |
| 申请人地址 | 天津市滨海新区经济技术开发区信环西路19号6号楼6101/6201/6202/6203 |
专利法律状态
2022-05-13
授权
状态信息
授权
摘要
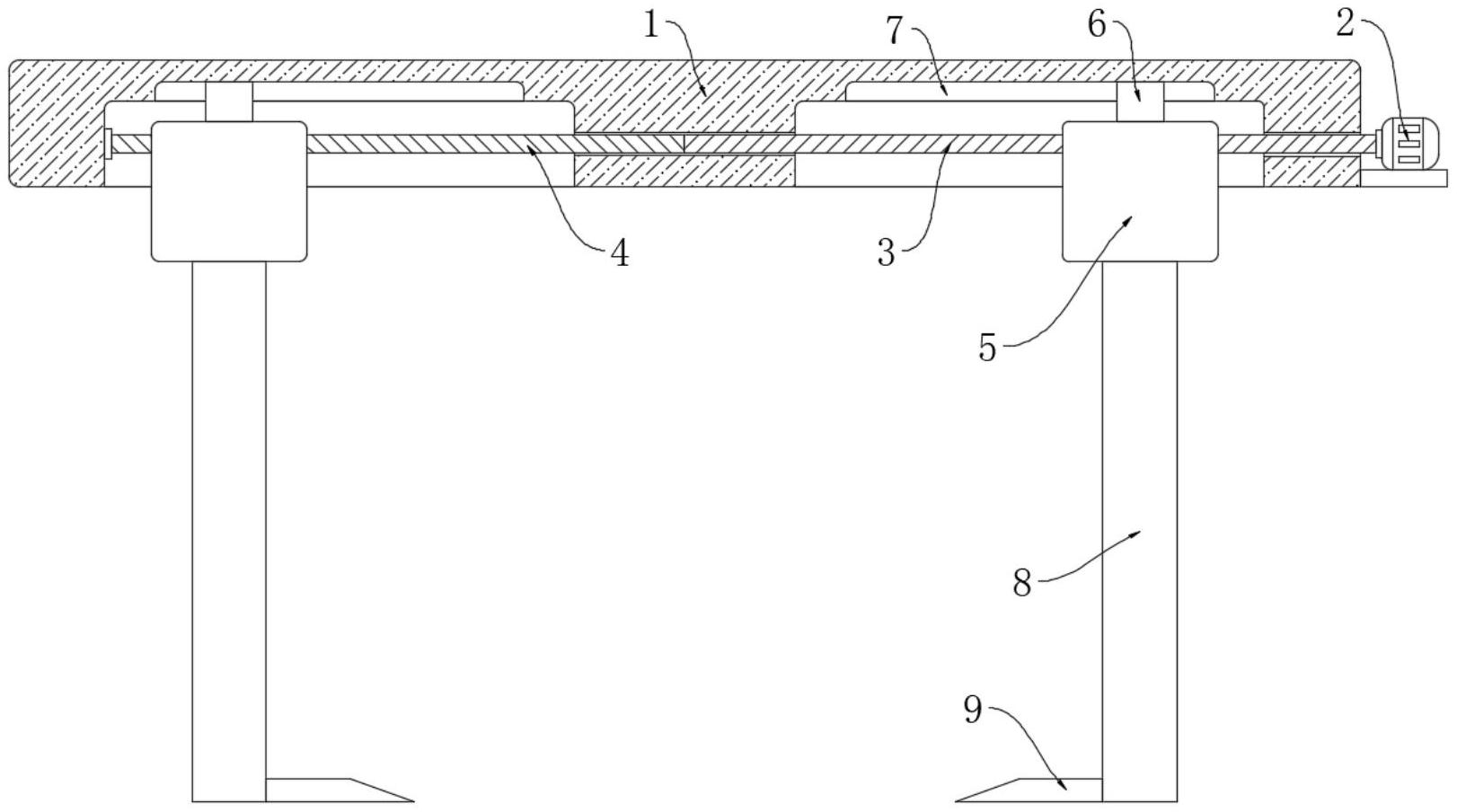
本实用新型公开了一种码垛用工业机器人复合夹具,包括连接板,所述连接板的外壁固定连接有支撑板,所述支撑板上固定连接有第一电机,所述第一电机的输出端固定连接有第一螺纹杆,所述第一螺纹杆贯穿连接板并与其转动连接,所述第一螺纹杆的另一端固定连接有第二螺纹杆,所述第二螺纹杆与连接板转动连接,六个所述夹持板上固定连接有底板。本实用新型,通过两侧的夹持板和底板相对移动可以对不同规格大小的箱体进行夹持,适用范围广;通过对箱体进行旋转使其位置进行调节,以满足不同的使用需要;通过对箱体的顶部进行限位,避免箱体在搬运的过程中掉落,导致箱体物料的损坏。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有