

授权公布号:CN114668634B
一种应用于外骨骼机器人的控制方法及装置
有效
申请
2020-12-24
申请公布
2022-06-28
授权
2023-11-21
预估到期
2040-12-24
| 申请号 | CN202011545032.1 |
| 申请日 | 2020-12-24 |
| 申请公布号 | CN114668634A |
| 申请公布日 | 2022-06-28 |
| 授权公布号 | CN114668634B |
| 授权公告日 | 2023-11-21 |
| 分类号 | G16H40/60;A61H3/00 |
| 分类 | 医学或兽医学;卫生学; |
| 申请人名称 | 沈阳新松机器人自动化股份有限公司 |
| 申请人地址 | 辽宁省沈阳市浑南新区金辉街16号 |
专利法律状态
2023-11-21
授权
状态信息
授权
2022-07-15
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):A61H3/00;申请日:20201224
2022-06-28
公布
状态信息
公布
摘要
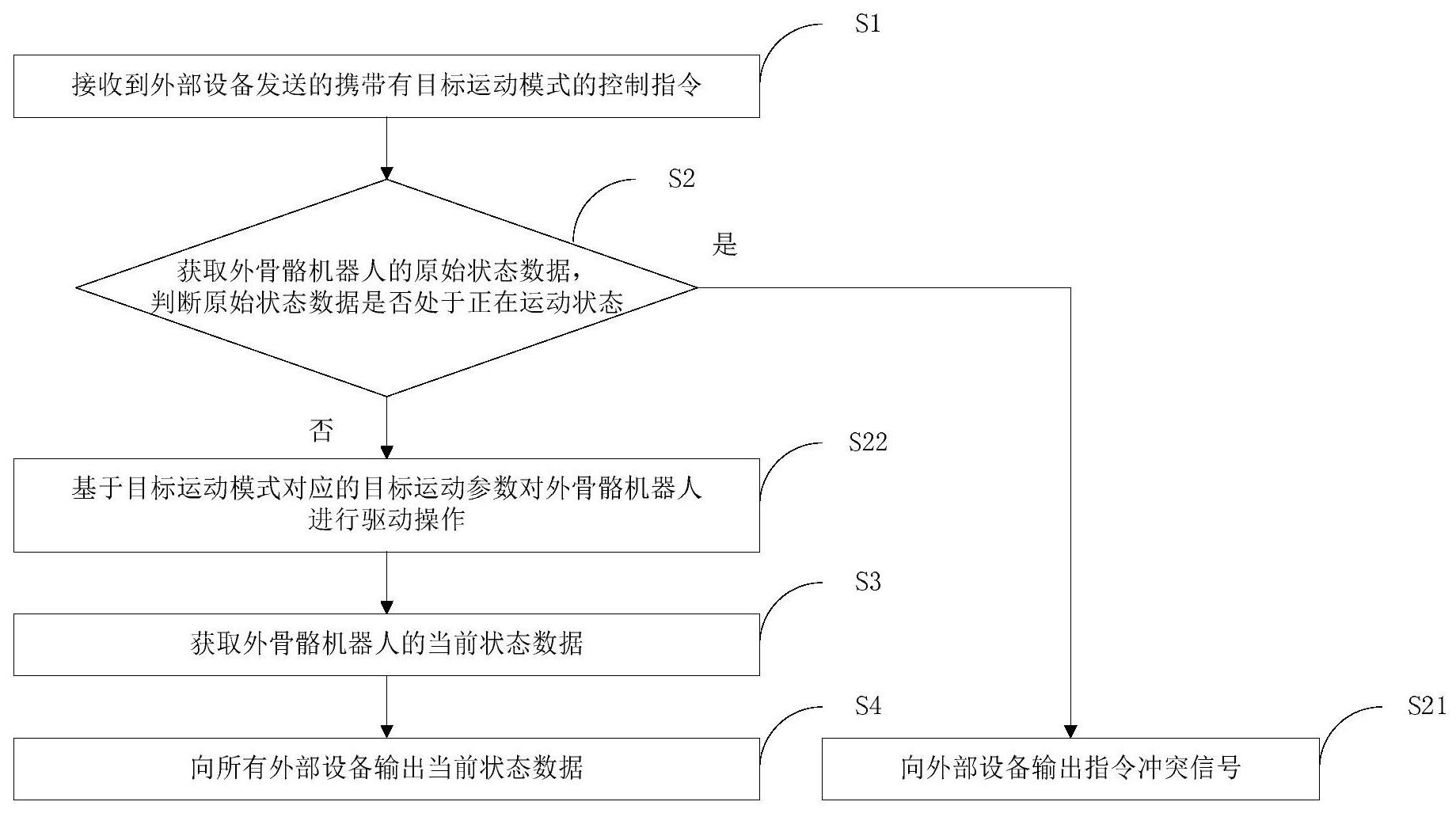
本发明涉及软件控制领域,具体涉及一种应用于外骨骼机器人的控制方法及装置。该方法及装置通过接收到多个外部设备发送的携带有目标运动模式的控制指令;获取外骨骼机器人的原始状态数据,判断原始状态数据是否处于正在运动状态;若原始状态数据处于正在运动状态,则向外部设备输出指令冲突信号;若原始状态数据不处于正在运动状态,则基于目标运动模式对应的目标运动参数对外骨骼机器人进行驱动操作;获取外骨骼机器人的当前状态数据;向所有外部设备输出当前状态数据;本发明应用于外骨骼机器人的控制方法及装置能够提高控制机器人运动的安全性以及可靠性。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有