

授权公布号:CN112706155B
一种模块化力位双闭环控制的超冗余绳驱动机器人
有效
申请
2020-12-30
申请公布
2021-04-27
授权
2024-03-12
预估到期
2040-12-30
| 申请号 | CN202011602173.2 |
| 申请日 | 2020-12-30 |
| 申请公布号 | CN112706155A |
| 申请公布日 | 2021-04-27 |
| 授权公布号 | CN112706155B |
| 授权公告日 | 2024-03-12 |
| 分类号 | B25J9/06;B25J9/10;B25J17/02 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 沈阳新松机器人自动化股份有限公司 |
| 申请人地址 | 辽宁省沈阳市浑南新区金辉街16号 |
专利法律状态
2024-03-12
授权
状态信息
授权
2021-05-14
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B25J9/06;申请日:20201230
2021-04-27
公布
状态信息
公布
摘要
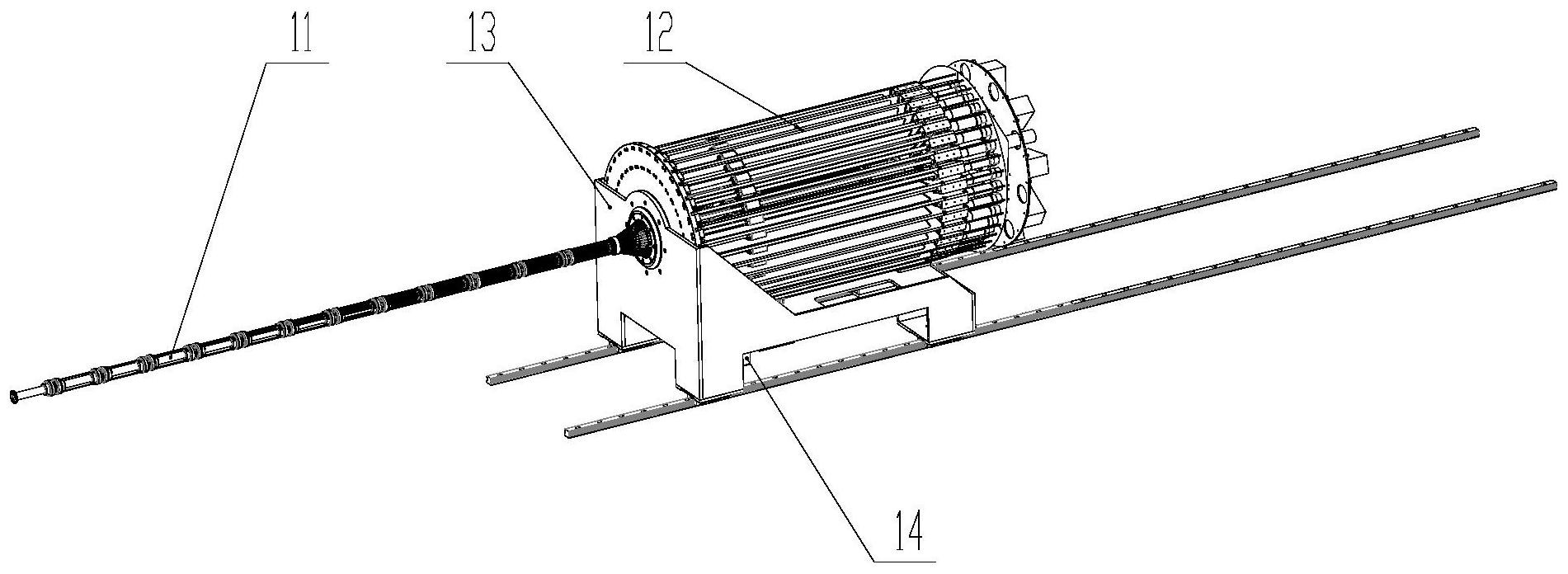
本发明属于机械臂技术领域,特别涉及一种模块化力位双闭环控制的超冗余绳驱动机器人。包括机械臂、驱动绳、驱动装置、支撑框架及线性运动组件,其中支撑框架设置于线性运动组件上,驱动装置设置于支撑框架上,机械臂包括固定段及设置于固定段前端的柔性段,固定段设置于驱动装置上,柔性段的各关节通过多个驱动绳与驱动装置连接。本发明不同编号的驱动单元具有不同的传动系数,能够实现合理的传动比匹配,能够在不影响机械臂负载能力的前提下,提高了机械臂的运行速度。本发明驱动单元中的直接或间接绳张力测量装置能够配合控制系统实现力位双闭环控制,能够有效补偿机械臂传动系统弱刚性结构的运动精度。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有