

授权公布号:CN113879953B
一种基于视觉识别定位的自动对接动力吊梁
有效
申请
2020-07-02
申请公布
2022-01-04
授权
2023-07-25
预估到期
2040-07-02
| 申请号 | CN202010632223.5 |
| 申请日 | 2020-07-02 |
| 申请公布号 | CN113879953A |
| 申请公布日 | 2022-01-04 |
| 授权公布号 | CN113879953B |
| 授权公告日 | 2023-07-25 |
| 分类号 | B66C1/12;B66C13/08 |
| 分类 | 卷扬;提升;牵引; |
| 申请人名称 | 沈阳新松机器人自动化股份有限公司 |
| 申请人地址 | 辽宁省沈阳市浑南新区金辉街16号 |
专利法律状态
2023-07-25
授权
状态信息
授权
2022-01-21
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B66C1/12;申请日:20200702
2022-01-04
公布
状态信息
公布
摘要
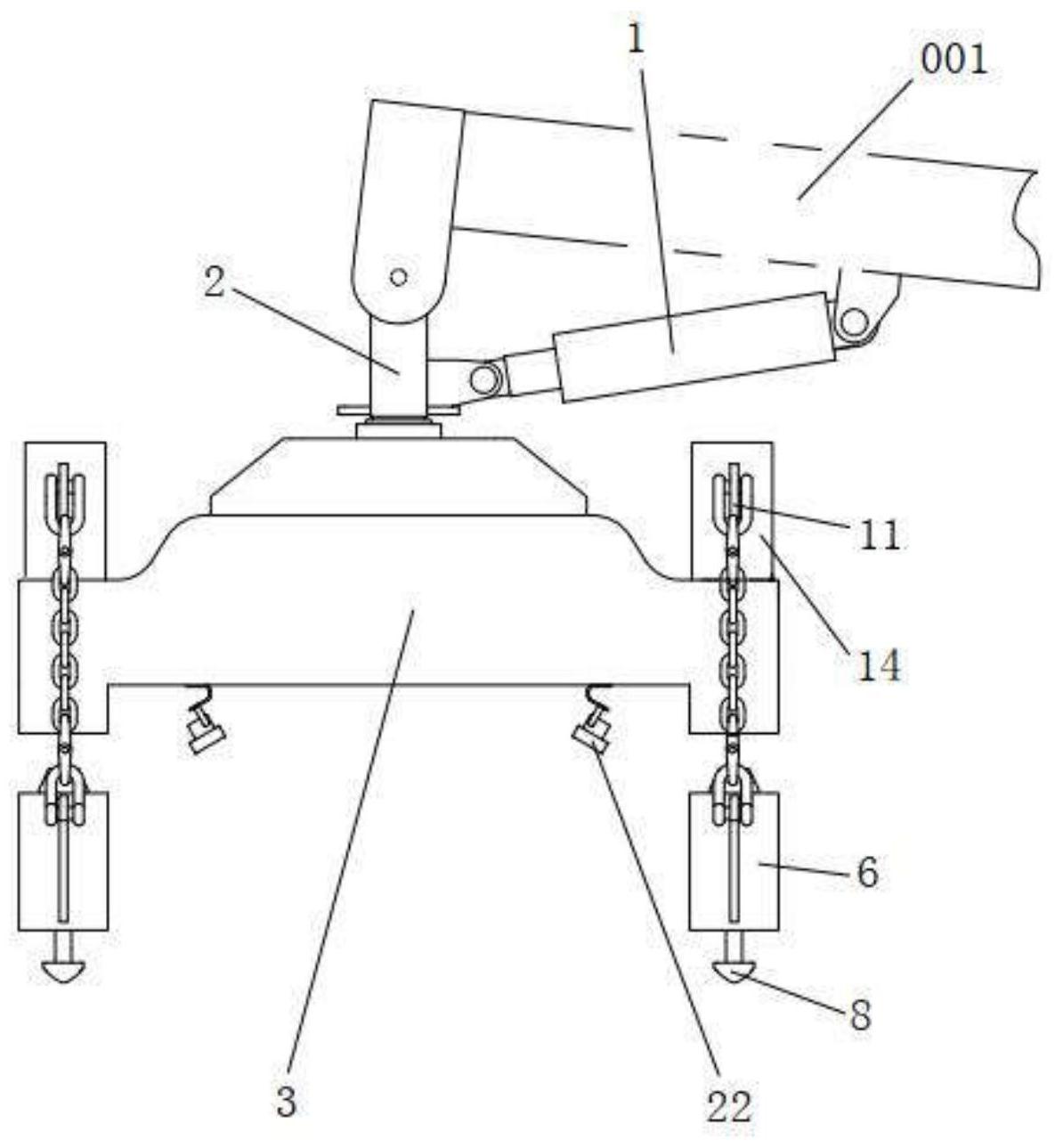
本发明属于起重机械领域,具体地说是一种基于视觉识别定位的自动对接动力吊梁。包括吊耳、摆动缸、驱动装置、吊梁箱体、刚柔转换机构、自动扭锁机构与视觉传感器。本发明通过自动扭锁机构的设置可自动与装载物锁紧连接,减少了操作时间,降低了工作人员的劳动强度;在空载时,自动扭锁机构的壳体与吊梁箱体之间稳定插接,保持刚性,方便与装载物对接,与装载物连接后,自动扭锁机构在链条或钢丝绳连接下为柔性,使起重机或重载机器人的操作难度降低,并且避免了多个起重机或重载机器人的同步误差导致被吊物品被拉拽损坏。本发明与现有的重载吊梁结构相比,实用性和通用性强,易推广,操作简便。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有