

授权公布号:CN114087422B
一种新型履带式机器人
有效
申请
2021-11-15
申请公布
2022-02-25
授权
2024-02-09
预估到期
2041-11-15
| 申请号 | CN202111348687.4 |
| 申请日 | 2021-11-15 |
| 申请公布号 | CN114087422A |
| 申请公布日 | 2022-02-25 |
| 授权公布号 | CN114087422B |
| 授权公告日 | 2024-02-09 |
| 分类号 | B62D55/06;F16L1/06;F16L1/024;B66F11/04;B65H75/44;B65H75/42 |
| 分类 | 工程元件或部件;为产生和保持机器或设备的有效运行的一般措施;一般绝热; |
| 申请人名称 | 沈阳新松机器人自动化股份有限公司 |
| 申请人地址 | 辽宁省沈阳市浑南新区金辉街16号 |
专利法律状态
2024-02-09
授权
状态信息
授权
2022-03-15
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):F16L1/06;申请日:20211115
2022-02-25
公布
状态信息
公布
摘要
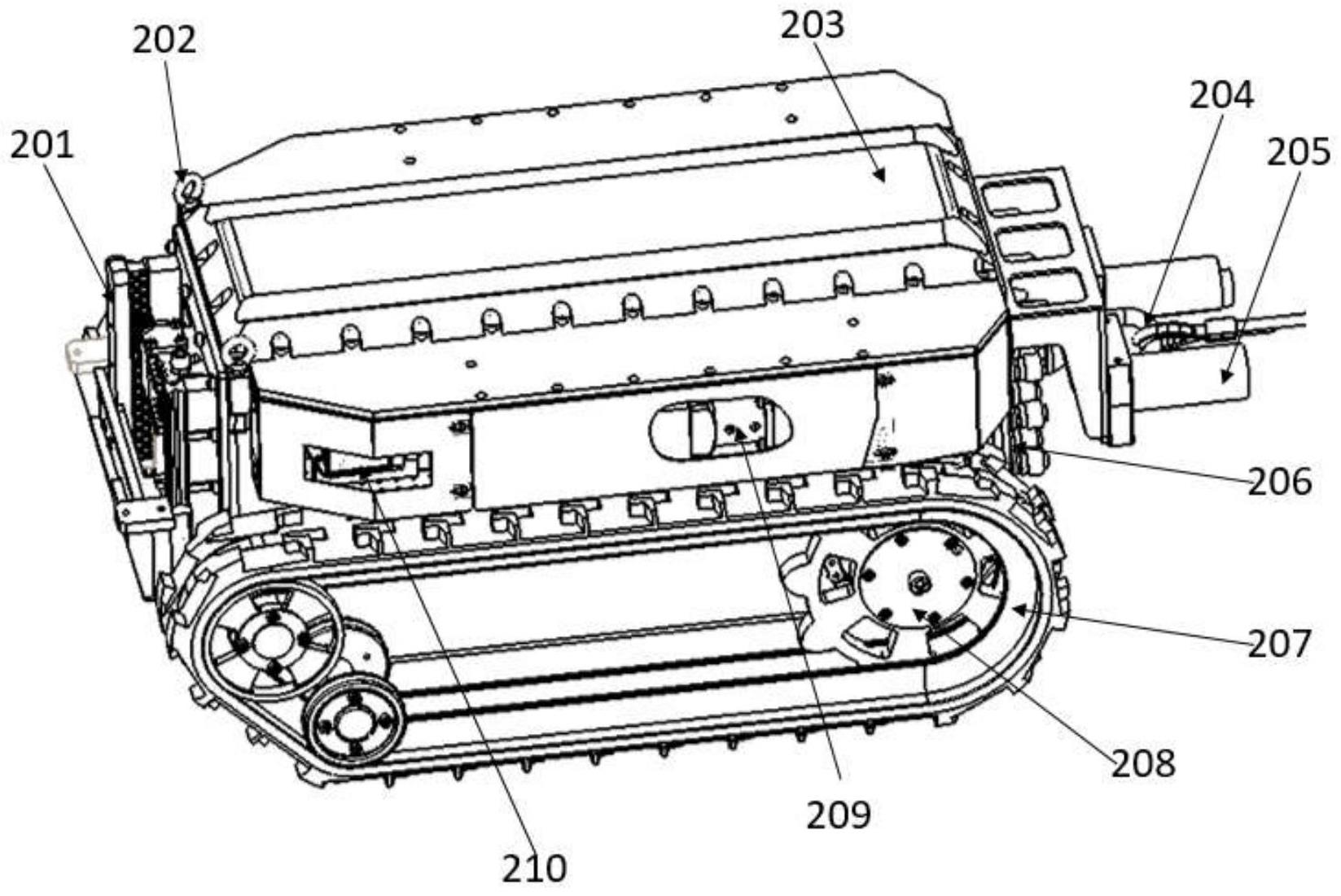
本发明涉及机器人技术领域,特别涉及一种新型履带式机器人。包括履带式机器人和管线拖拽及收放系统,其中履带式机器人前端设有提升机构,提升机构能够实现工具的搭载及工具越障;管线拖拽及收放系统用于为履带式机器人提供动力电源、脱拽及收放动力。本发明满足了机器人更大的搭载空间和优良的防水密封性能;利用管线拖拽及收放系统满足了机器人行走与拖拽管线的同步协调;利用环境测量感知系统、本地电气控制柜、远程操作琴台、先进的软件算法实现了防碰撞、防倾覆、远程操控及局部自主作业。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有