

授权公布号:CN112720561B
一种方形模块化力位双闭环控制的超冗余绳驱动机器人
有效
申请
2020-12-30
申请公布
2021-04-30
授权
2024-03-12
预估到期
2040-12-30
| 申请号 | CN202011602164.3 |
| 申请日 | 2020-12-30 |
| 申请公布号 | CN112720561A |
| 申请公布日 | 2021-04-30 |
| 授权公布号 | CN112720561B |
| 授权公告日 | 2024-03-12 |
| 分类号 | B25J17/00;B25J18/00;B25J19/00 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 沈阳新松机器人自动化股份有限公司 |
| 申请人地址 | 辽宁省沈阳市浑南新区金辉街16号 |
专利法律状态
2024-03-12
授权
状态信息
授权
2021-05-21
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B25J17/00;申请日:20201230
2021-04-30
公布
状态信息
公布
摘要
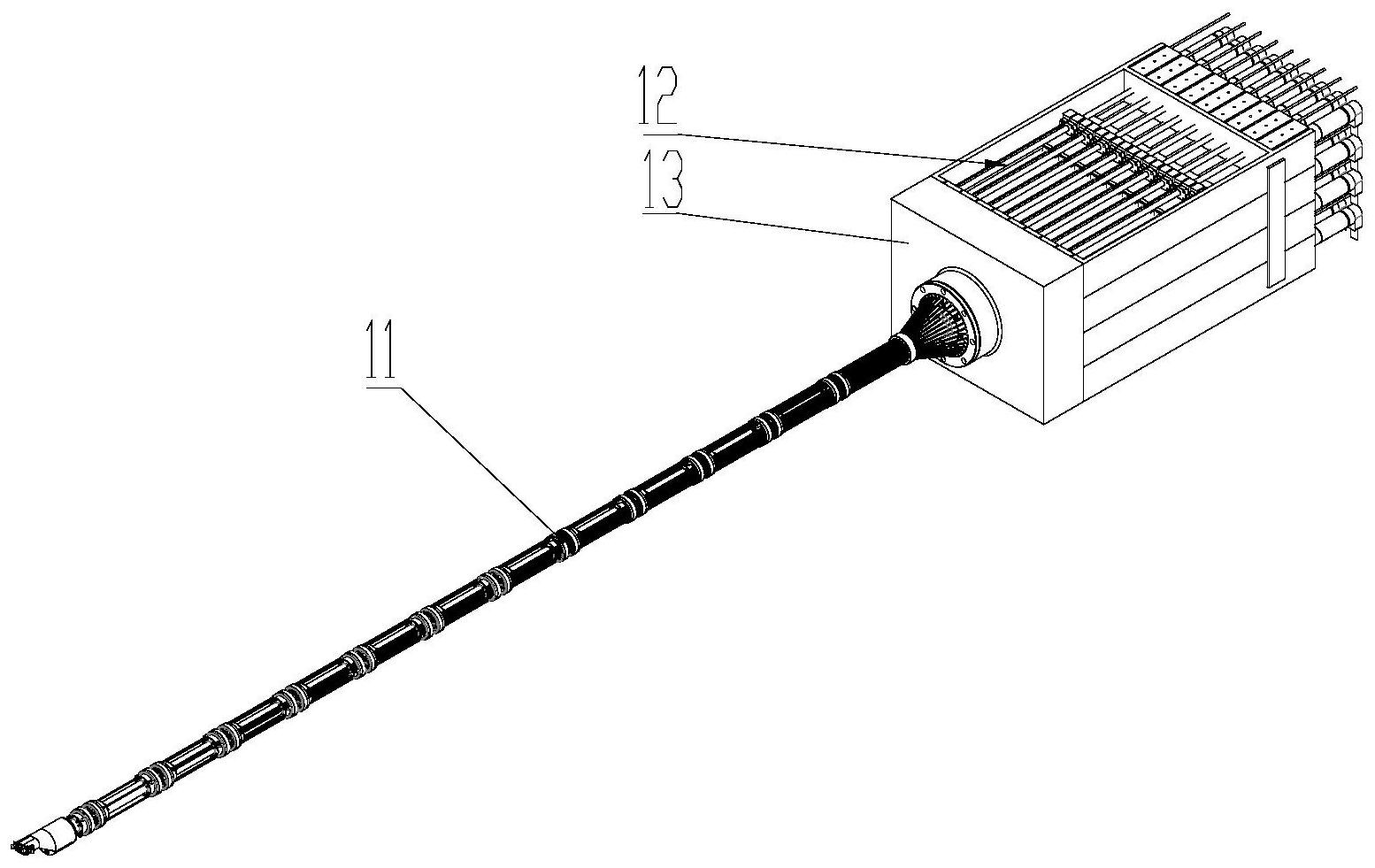
本发明属于机械臂技术领域,特别涉及一种方形模块化力位双闭环控制的超冗余绳驱动机器人。包括机械臂、绳驱组件、驱动模块及箱体,其中箱体为方形结构,驱动模块设置于箱体内,机械臂设置于箱体的外侧,机械臂的各关节分别通过一组绳驱组件与驱动模块连接。机械臂包括固定段及与固定段连接的柔性段,固定段与箱体连接,柔性段包括通过虎克铰依次铰接的多个连接筒;每组绳驱组件包括三个钢丝绳组件,三个钢丝绳组件的一端与一虎克铰连接,另一端与驱动模块连接。本发明的机械臂和驱动装置含有模块化的,具有不同的传动系数,能够实现合理的传动比匹配,能够在不影响机械臂负载能力的前提下,提高了机械臂的运行速度。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有