

授权公布号:CN113979355B
一种自动移载悬臂轴式AGV系统
有效
申请
2020-07-27
申请公布
2022-01-28
授权
2024-01-23
预估到期
2040-07-27
| 申请号 | CN202010730183.8 |
| 申请日 | 2020-07-27 |
| 申请公布号 | CN113979355A |
| 申请公布日 | 2022-01-28 |
| 授权公布号 | CN113979355B |
| 授权公告日 | 2024-01-23 |
| 分类号 | B66F9/06;B66F9/12;B66F9/14;B66F9/08;B66F9/18;B66F9/19;B66F9/20;B66F9/24 |
| 分类 | 卷扬;提升;牵引; |
| 申请人名称 | 沈阳新松机器人自动化股份有限公司 |
| 申请人地址 | 辽宁省沈阳市浑南新区金辉街16号 |
专利法律状态
2024-01-23
授权
状态信息
授权
2022-02-18
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B66F9/06;申请日:20200727
2022-01-28
公布
状态信息
公布
摘要
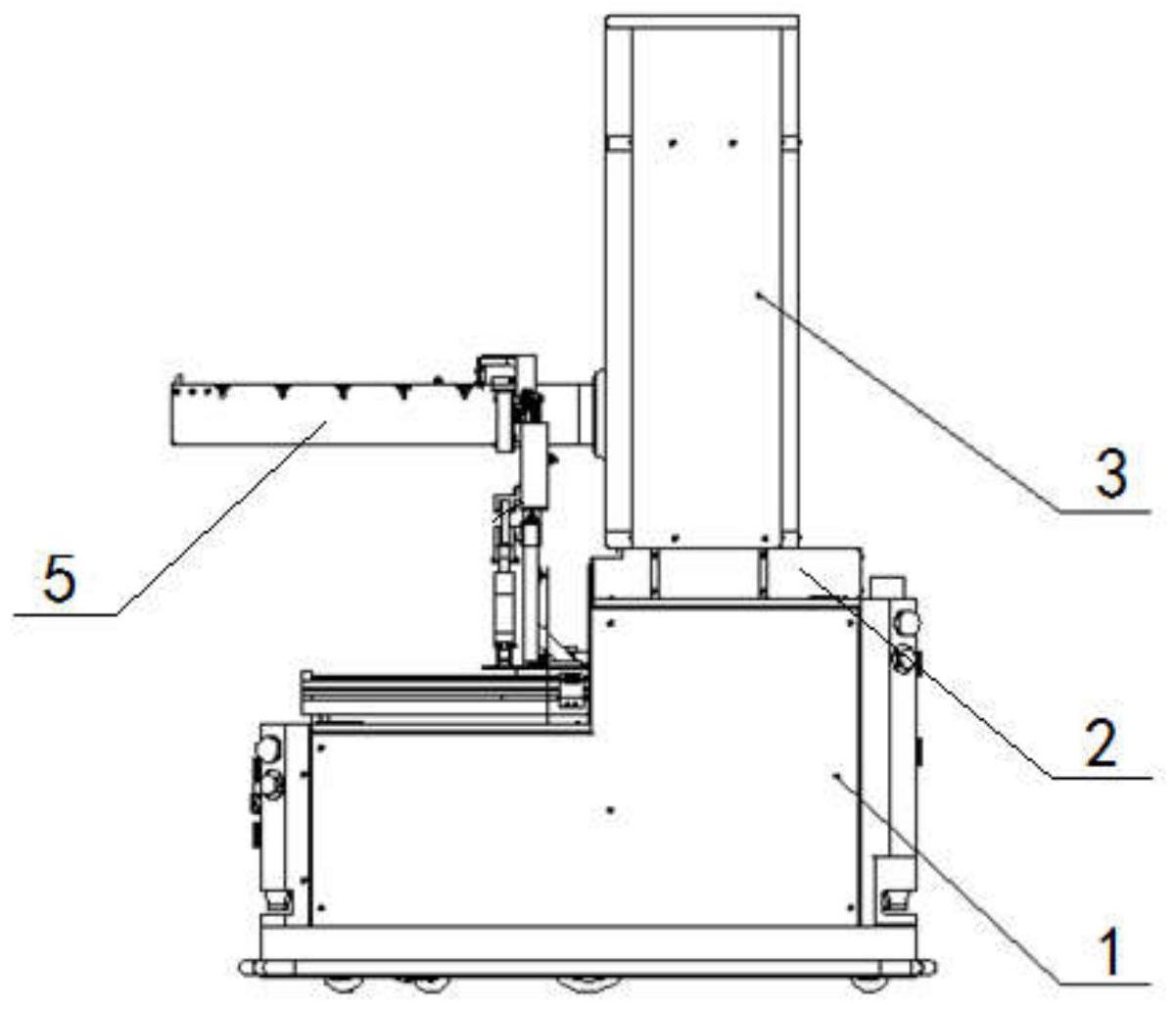
本发明属于AGV技术领域,特别涉及一种自动移载悬臂轴式AGV系统。包括AGV车、平移机构、举升机构及支撑轴组件,其中平移机构设置于AGV车上,并且具有沿X、Y方向移动的自由度;举升机构设置于平移机构上,具有沿Z向移动的自由度;支撑轴组件设置于举升机构上,用于支撑物料。本发明由于稳定性及精度提高,而且设备响应时间短,保证了车间极片的快节拍生产与转运,在车间推广,效果良好。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有