

授权公布号:CN220408798U
一种末端锁定型机器人防坠落工装
有效
申请
2023-07-31
申请公布
1970-01-01
授权
2024-01-30
预估到期
2033-07-31
| 申请号 | CN202322056117.9 |
| 申请日 | 2023-07-31 |
| 授权公布号 | CN220408798U |
| 授权公告日 | 2024-01-30 |
| 分类号 | B25J19/00;B25J11/00 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 沈阳新松机器人自动化股份有限公司 |
| 申请人地址 | 辽宁省沈阳市浑南新区金辉街16号 |
专利法律状态
2024-01-30
授权
状态信息
授权
摘要
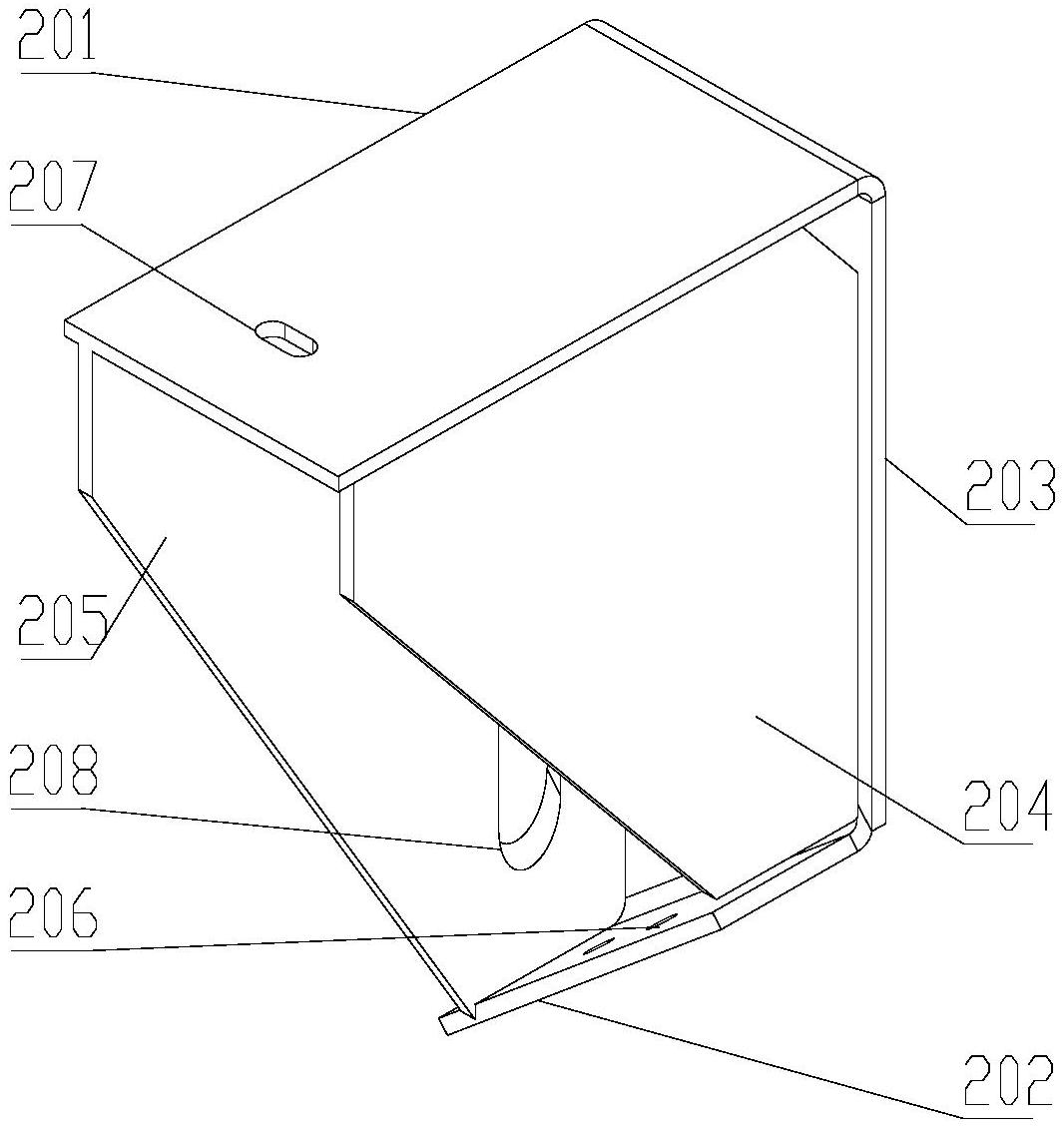
本实用新型属于机器人技术领域,特别涉及一种末端锁定型机器人防坠落工装。一种末端锁定型机器人防坠落工装,用于锁定六自由度垂直多关节型工业机器人的运输位姿,末端锁定型机器人防坠落工装包括防坠落工装本体;防坠落工装本体包括上板、下斜板及立板,其中立板的上、下端分别与上板和下斜板垂直连接,且下斜板与上板非平行,上板用于与锁定六自由度垂直多关节型工业机器人的末端法兰连接,下斜板用于与锁定六自由度垂直多关节型工业机器人的大臂连接,使六自由度垂直多关节型工业机器人在运输状态呈闭环结构。本实用新型在运输过程中产生的振动和运输加速度,不会对一至四轴的电机和减速机产生冲击扭矩,提高电机和减速机寿命。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有