

授权公布号:CN112785827B
一种基于网络通讯技术的天线角度控制系统及方法
有效
申请
2019-11-06
申请公布
2021-05-11
授权
2023-09-19
预估到期
2039-11-06
| 申请号 | CN201911075860.0 |
| 申请日 | 2019-11-06 |
| 申请公布号 | CN112785827A |
| 申请公布日 | 2021-05-11 |
| 授权公布号 | CN112785827B |
| 授权公告日 | 2023-09-19 |
| 分类号 | G08C17/02;H01Q1/12;H01Q3/08 |
| 分类 | 信号装置; |
| 申请人名称 | 沈阳新松机器人自动化股份有限公司 |
| 申请人地址 | 辽宁省沈阳市浑南新区金辉街16号 |
专利法律状态
2023-09-19
授权
状态信息
授权
2021-05-28
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G08C17/02;申请日:20191106
2021-05-11
公布
状态信息
公布
摘要
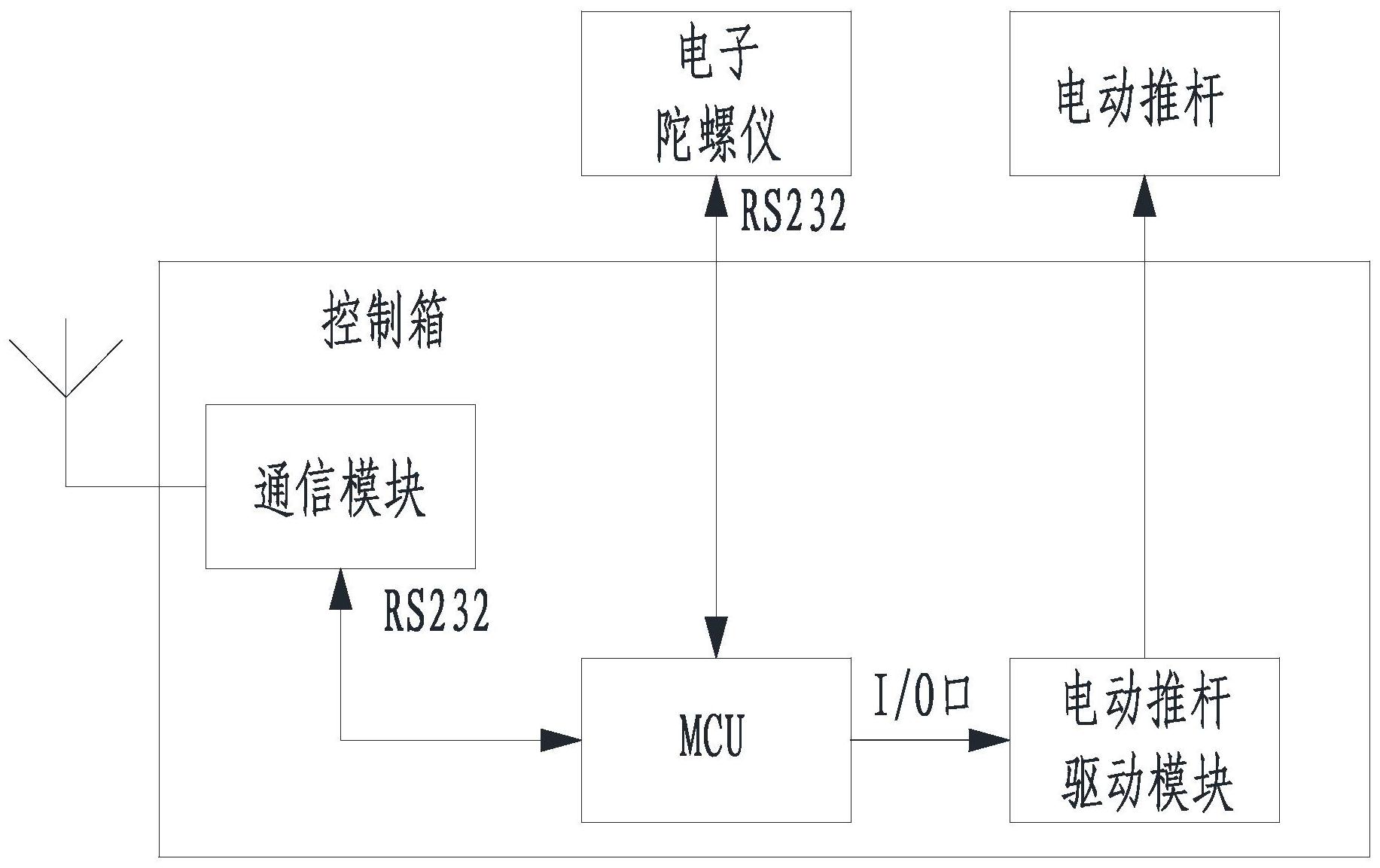
本发明涉及天线角度的远程控制,具体地说是一种基于网络通讯技术的天线角度控制系统及方法,包括:控制箱以及与其连接的电子陀螺仪、电动推杆;所述控制箱内设有电路板,该电路板上设有包括MCU以及与所述MCU连接的通信模块、电动推杆驱动模块;所述通信模块,还连有天线或网络接口,用于实现无线通信;所述MCU,用于接收电子陀螺仪的反馈信号,并发送控制指令至电动推杆驱动模块进而控制电动推杆,将反馈信号和控制指令发送至通信模块;本发明代替人工攀爬调节,减少人工调节,调节过程中更为安全,调节天线角度较人工控制调整更加精确,天线倾角数据清晰可见,减少了角度误差。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有