

授权公布号:CN220637967U
机器人关节结构及机器人
有效
申请
2023-07-19
申请公布
1970-01-01
授权
2024-03-22
预估到期
2033-07-19
| 申请号 | CN202321909774.7 |
| 申请日 | 2023-07-19 |
| 授权公布号 | CN220637967U |
| 授权公告日 | 2024-03-22 |
| 分类号 | B25J17/02;B25J18/00 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 深圳市汇川技术股份有限公司 |
| 申请人地址 | 广东省深圳市龙华区观澜街道高新技术产业园汇川技术总部大厦 |
专利法律状态
2024-03-22
授权
状态信息
授权
摘要
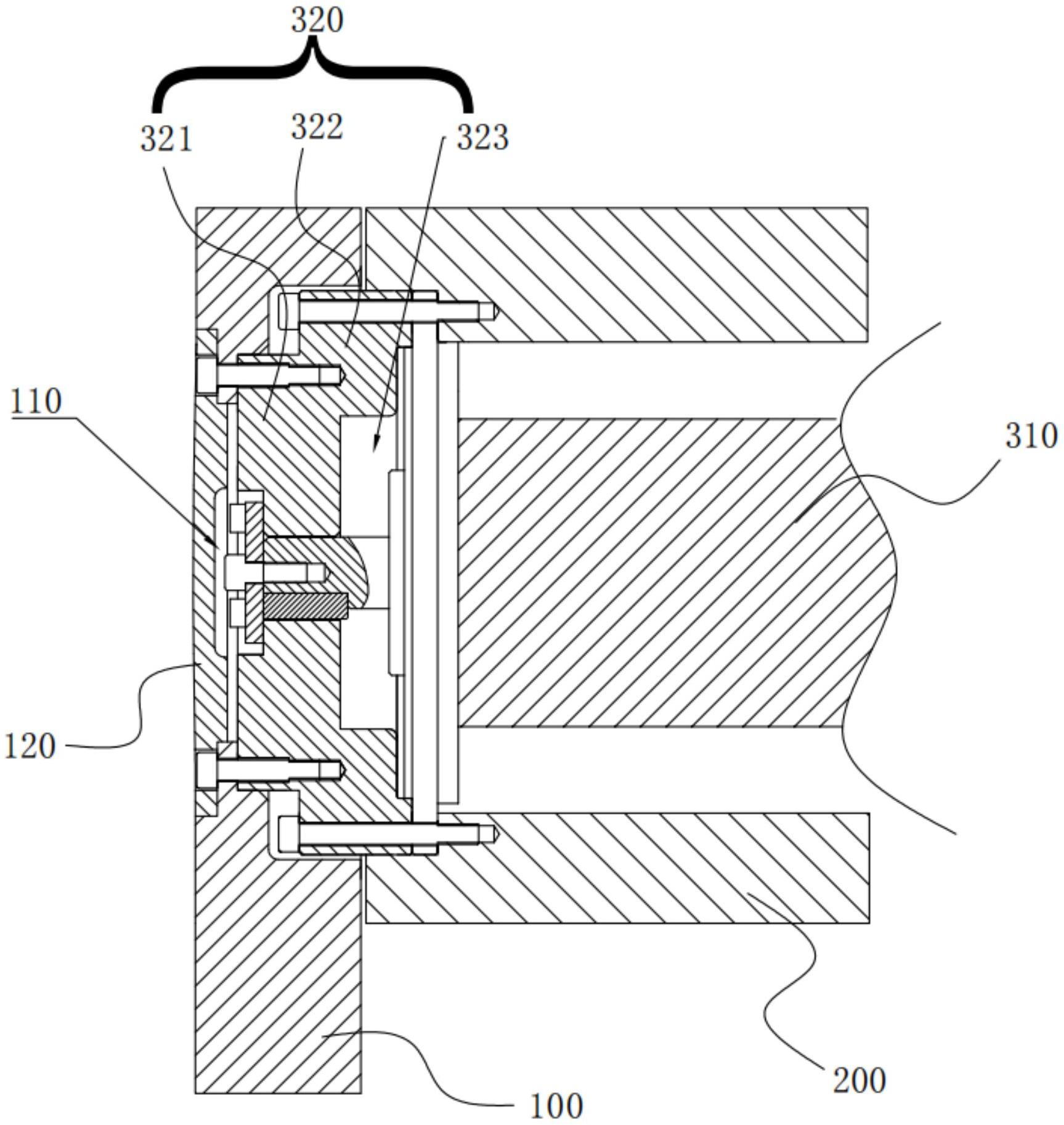
本实用新型公开一种机器人关节结构及机器人,应用于多关节机器人,多关节机器人至少包括第一机械臂和第二机械臂,机器人关节结构包括:驱动电机,设于第二机械臂的内壁;谐波减速机,谐波减速机包括刚柔轮及设置在刚柔轮内部的波发生器,驱动电机与波发生器驱动连接,刚柔轮包括转动连接的刚轮及柔轮,波发生器设置在刚轮的内部,柔轮设置在刚轮的外侧且沿驱动电机的轴向延伸以形成具有开口的腔体,腔体的开口朝向或背向驱动电机,刚轮和柔轮中背向驱动电机的一个与第一机械臂连接;以及法兰盘,设于驱动电机的外周面,第二机械臂与法兰盘连接。本实用新型提出的技术方案,解决了目前机器人关节装置不方便拆装的技术问题。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有