

授权公布号:CN113496059B
机器人工具负载质心辨识方法、系统、设备及存储介质
有效
申请
2020-04-03
申请公布
2021-10-12
授权
2024-01-26
预估到期
2040-04-03
| 申请号 | CN202010262516.9 |
| 申请日 | 2020-04-03 |
| 申请公布号 | CN113496059A |
| 申请公布日 | 2021-10-12 |
| 授权公布号 | CN113496059B |
| 授权公告日 | 2024-01-26 |
| 分类号 | G06F30/17;G06F30/20;G06F119/14N |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 深圳市汇川技术股份有限公司 |
| 申请人地址 | 广东省深圳市龙华新区观澜街道高新技术产业园汇川技术总部大厦 |
专利法律状态
2024-01-26
授权
状态信息
授权
2021-10-29
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G06F30/17;申请日:20200403
2021-10-12
公布
状态信息
公布
摘要
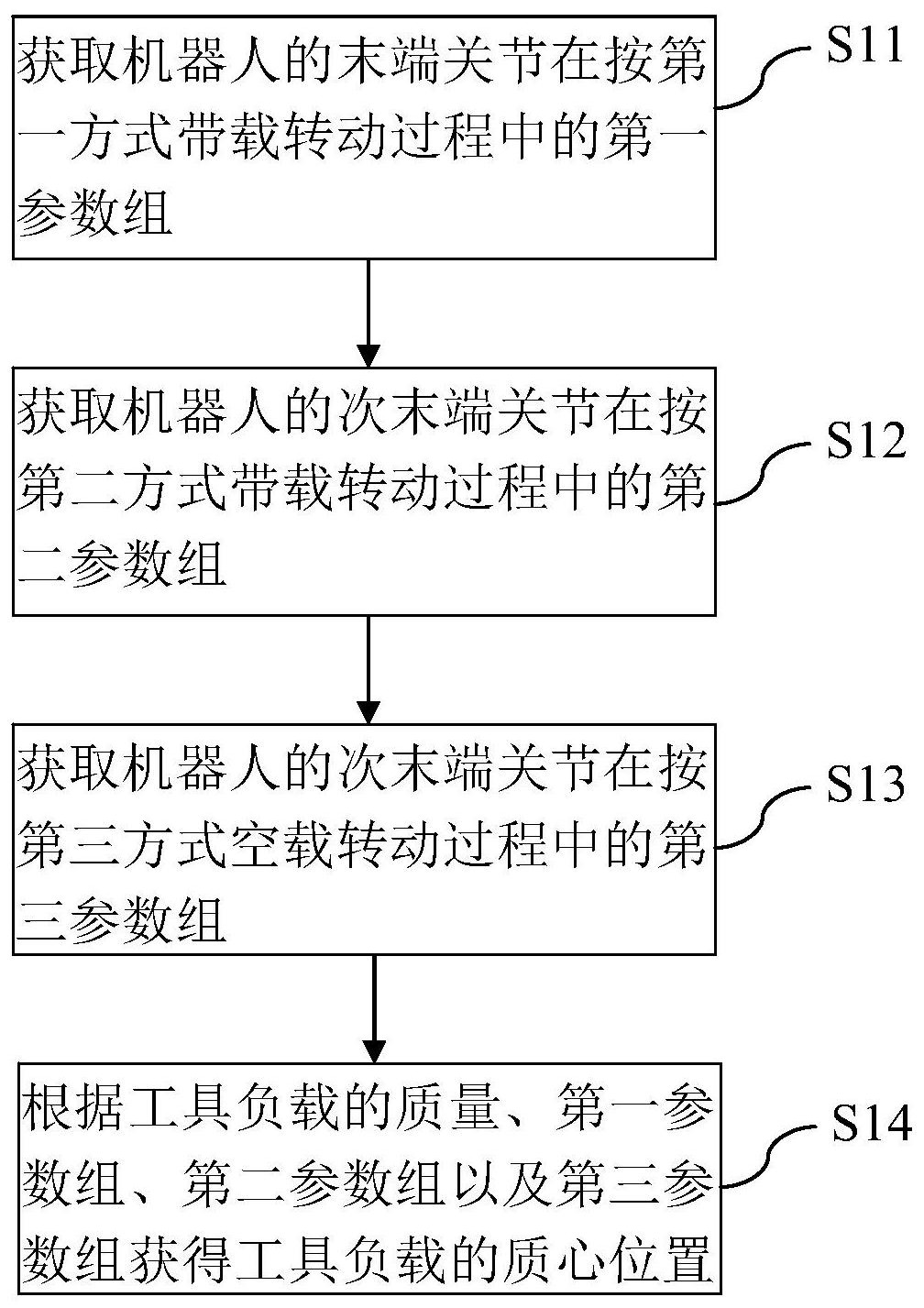
本发明实施例提供了一种机器人工具负载质心辨识方法、系统、设备及存储介质,所述方法包括:获取所述机器人的末端关节在按第一方式带载转动过程中的第一参数组;获取所述机器人的次末端关节在按第二方式带载转动过程中的第二参数组;获取所述机器人的次末端关节在按第三方式空载转动过程中的第三参数组;根据所述工具负载的质量、第一参数组、第二参数组以及第三参数组获得所述工具负载的质心位置。本发明实施例通过采集机器人本体与工具负载相邻两个关节的转动参数,并结合工具负载的质量,获取工具负载的质心位置,无需工具负载的CAD图纸,也无需机器人本体的动力学方程,大大简化了工具负载的质心位置的辨识操作。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有