

授权公布号:CN216996712U
一种双爪复合式高效码垛夹持器
有效
申请
2022-04-22
申请公布
1970-01-01
授权
2022-07-19
预估到期
2032-04-22
| 申请号 | CN202220943621.3 |
| 申请日 | 2022-04-22 |
| 授权公布号 | CN216996712U |
| 授权公告日 | 2022-07-19 |
| 分类号 | B65G61/00 |
| 分类 | 输送;包装;贮存;搬运薄的或细丝状材料; |
| 申请人名称 | 聊城鑫泰机床有限公司 |
| 申请人地址 | 山东省聊城市东阿县工业园香江路东聊城鑫泰机床有限公司 |
专利法律状态
2022-07-19
授权
状态信息
授权
摘要
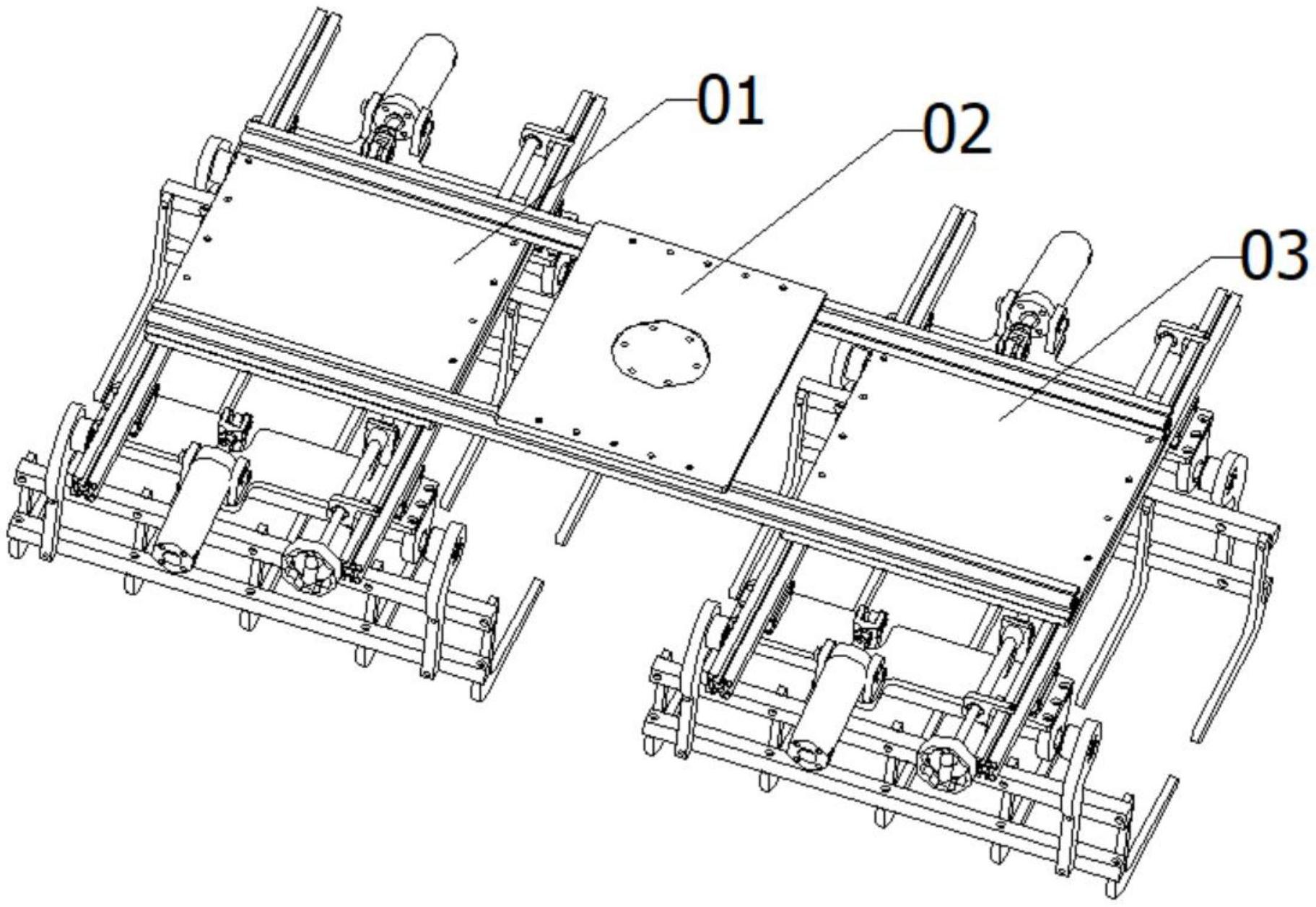
本实用新型属于工业机器人码垛技术领域,具体涉及一种双爪复合式高效码垛夹持器,包括配合使用的夹爪一、连架和夹爪二,所述夹爪一和夹爪二对称固定于连架的两端,夹爪一和夹爪二均包括支架、调整组件、气缸组件一、气缸组件二、手指一和手指二,调整组件固定于支架的底部,手指一和手指二分别固定于调整组件的两端,手指一和手指二能在调整组件上移动,气缸组件一固定于手指一上,气缸组件二固定于手指二上。本实用新型的码垛夹持器含有两副夹爪,通过连架相连,每次取料时,先由夹爪一取料,而后再由夹爪二取料,再对应相应的码垛程序进行码放。通过夹爪一、连架、夹爪二的配合使用,再结合桁架或工业机器人使用,大幅度提高码垛效率。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有