

授权公布号:CN109214984B
一种图像获取方法及装置、自主定位导航系统、计算设备
有效
申请
2017-07-03
申请公布
2019-01-15
授权
2023-03-14
预估到期
2037-07-03
| 申请号 | CN201710534380.0 |
| 申请日 | 2017-07-03 |
| 申请公布号 | CN109214984A |
| 申请公布日 | 2019-01-15 |
| 授权公布号 | CN109214984B |
| 授权公告日 | 2023-03-14 |
| 分类号 | G06T3/40;G01C21/20 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 臻迪科技股份有限公司 |
| 申请人地址 | 山东省威海市南海新区阳光路40号蓝色创业谷E区 |
专利法律状态
2023-03-14
授权
状态信息
授权
2019-01-15
公布
状态信息
公布
摘要
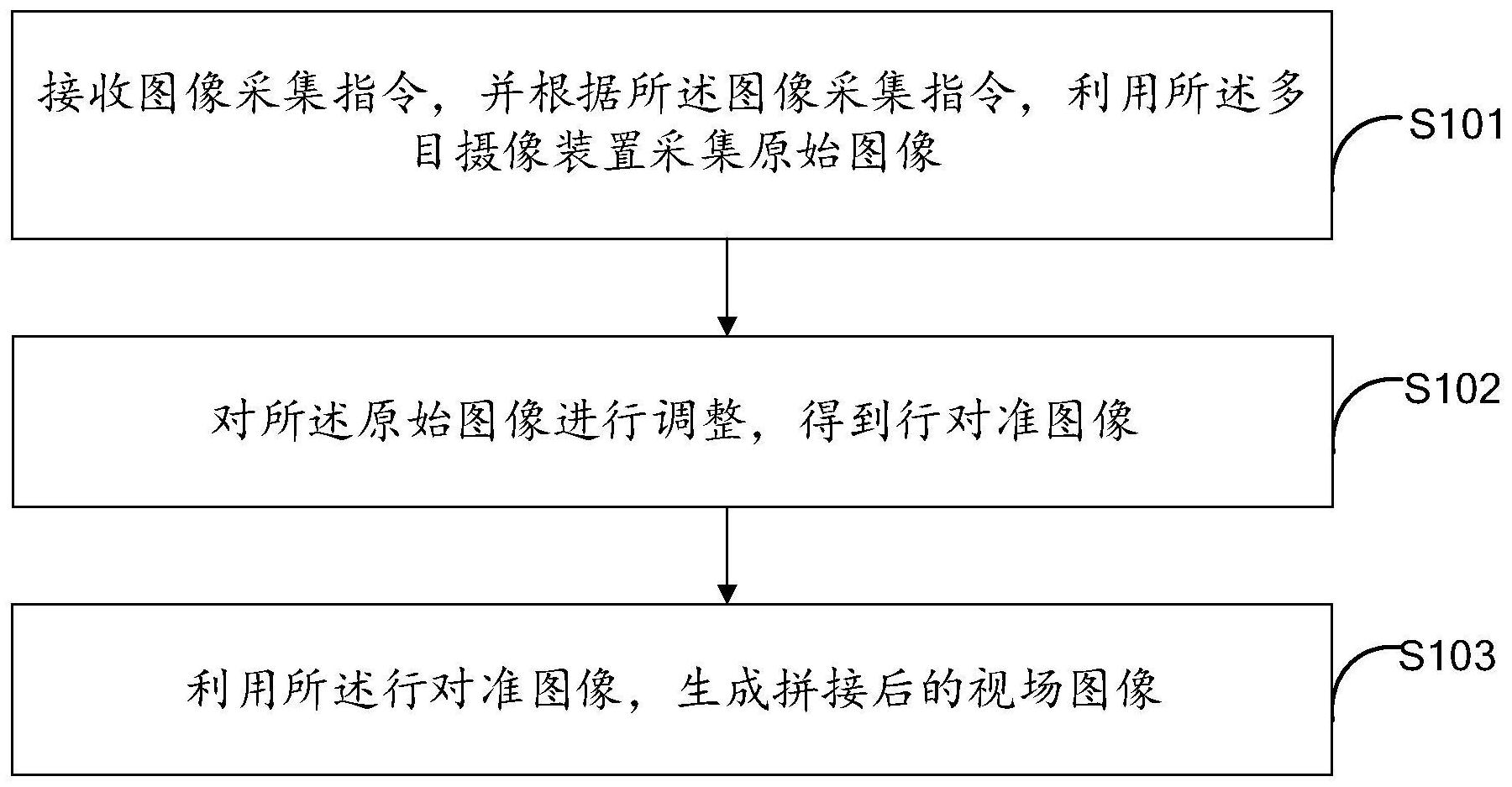
本发明提供了一种图像获取方法及装置、自主定位导航系统、计算设备,用以利用多目摄像装置采集原始图像,并将原始图像进行拼接的方法,获得大视场角的图像,从而为后期测算运动轨迹提供了更多的场景信息;而且由于并未改变摄像装置的镜头,也就避免了采集到的图像的畸变的问题,为后期测算运动轨迹提供了高分辨率的图像,从而提高了测算的准确性。所述方法包括:接收图像采集指令,并根据所述图像采集指令,利用所述多目摄像装置采集原始图像;对所述原始图像进行调整,得到行对准图像;利用所述行对准图像,生成拼接后的视场图像。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有