

授权公布号:CN113424232B
三维点云地图构建方法、系统和设备
有效
申请
2019-12-27
申请公布
2021-09-21
授权
2024-03-15
预估到期
2039-12-27
| 申请号 | CN201980091861.6 |
| 申请日 | 2019-12-27 |
| 申请公布号 | CN113424232A |
| 申请公布日 | 2021-09-21 |
| 授权公布号 | CN113424232B |
| 授权公告日 | 2024-03-15 |
| 分类号 | G06T17/00 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 深圳市大疆创新科技有限公司 |
| 申请人地址 | 广东省深圳市南山区高新区南区粤兴一道9号香港科大深圳产学研大楼6楼 |
专利法律状态
2024-03-15
授权
状态信息
授权
2021-10-12
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G06T17/00;申请日:20191227
2021-09-21
公布
状态信息
公布
摘要
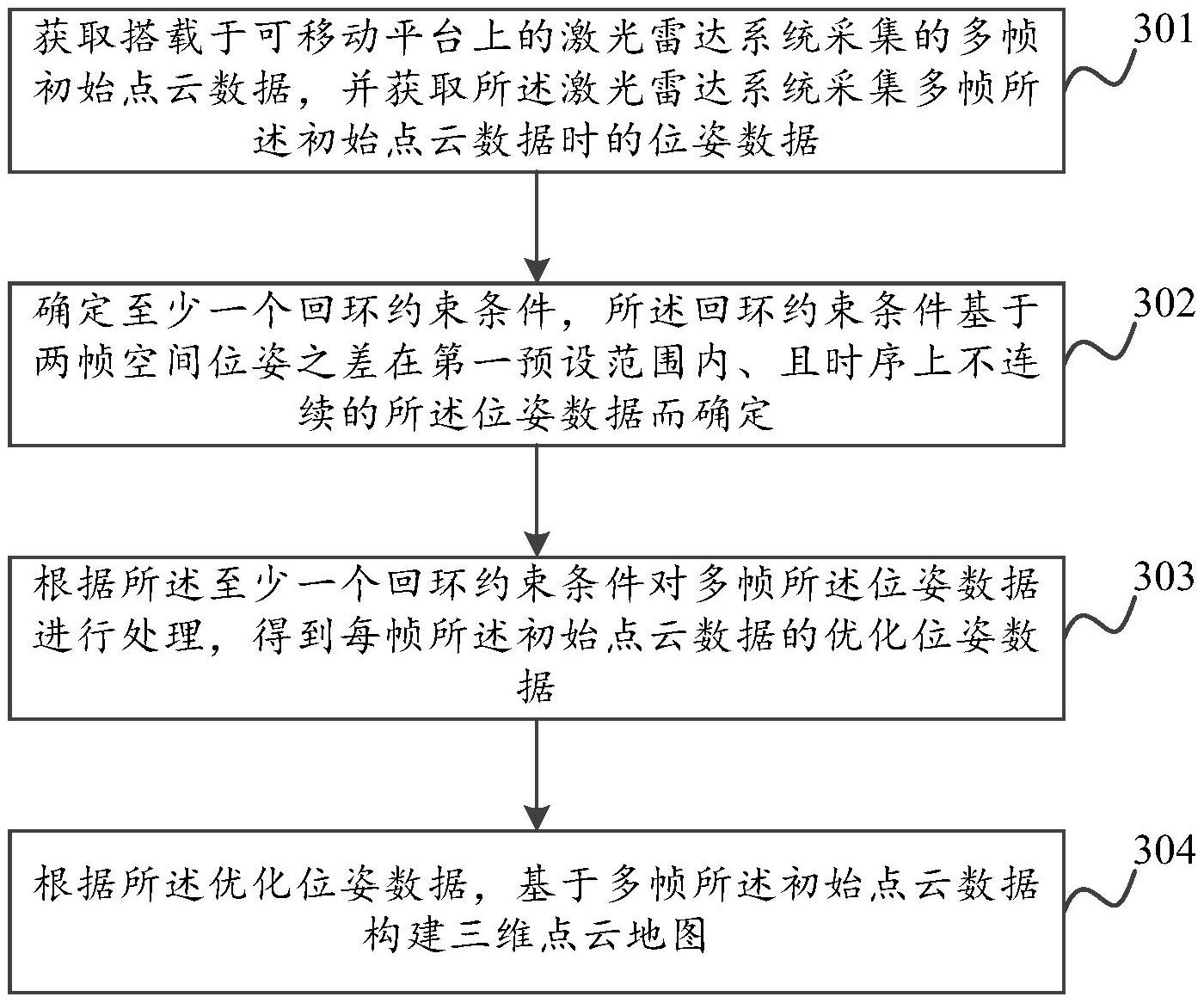
一种三维点云地图构建方法、系统和设备,所述方法包括:获取搭载于可移动平台上的激光雷达系统采集的多帧初始点云数据,并获取所述激光雷达系统采集多帧所述初始点云数据时的位姿数据(301);确定至少一个回环约束条件,所述回环约束条件基于两帧空间位姿之差在第一预设范围内、且时序上不连续的所述位姿数据而确定(302);根据所述至少一个回环约束条件对所述位姿数据进行处理,得到每帧所述初始点云数据的优化位姿数据(303);根据所述优化位姿数据,基于多帧所述初始点云数据构建三维点云地图(304)。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有