

授权公布号:CN112154446B
立体车道线确定方法、装置和电子设备
有效
申请
2019-09-19
申请公布
2020-12-29
授权
2024-03-19
预估到期
2039-09-19
| 申请号 | CN201980033269.0 |
| 申请日 | 2019-09-19 |
| 申请公布号 | CN112154446A |
| 申请公布日 | 2020-12-29 |
| 授权公布号 | CN112154446B |
| 授权公告日 | 2024-03-19 |
| 分类号 | G06V20/56;G06V10/762;G06V10/82;G06N3/08;G06N20/00 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 深圳市大疆创新科技有限公司 |
| 申请人地址 | 广东省深圳市南山区高新区南区粤兴一道9号香港科大深圳产学研大楼6楼 |
专利法律状态
2024-03-19
授权
状态信息
授权
2021-01-15
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G06K9/00;申请日:20190919
2020-12-29
公布
状态信息
公布
摘要
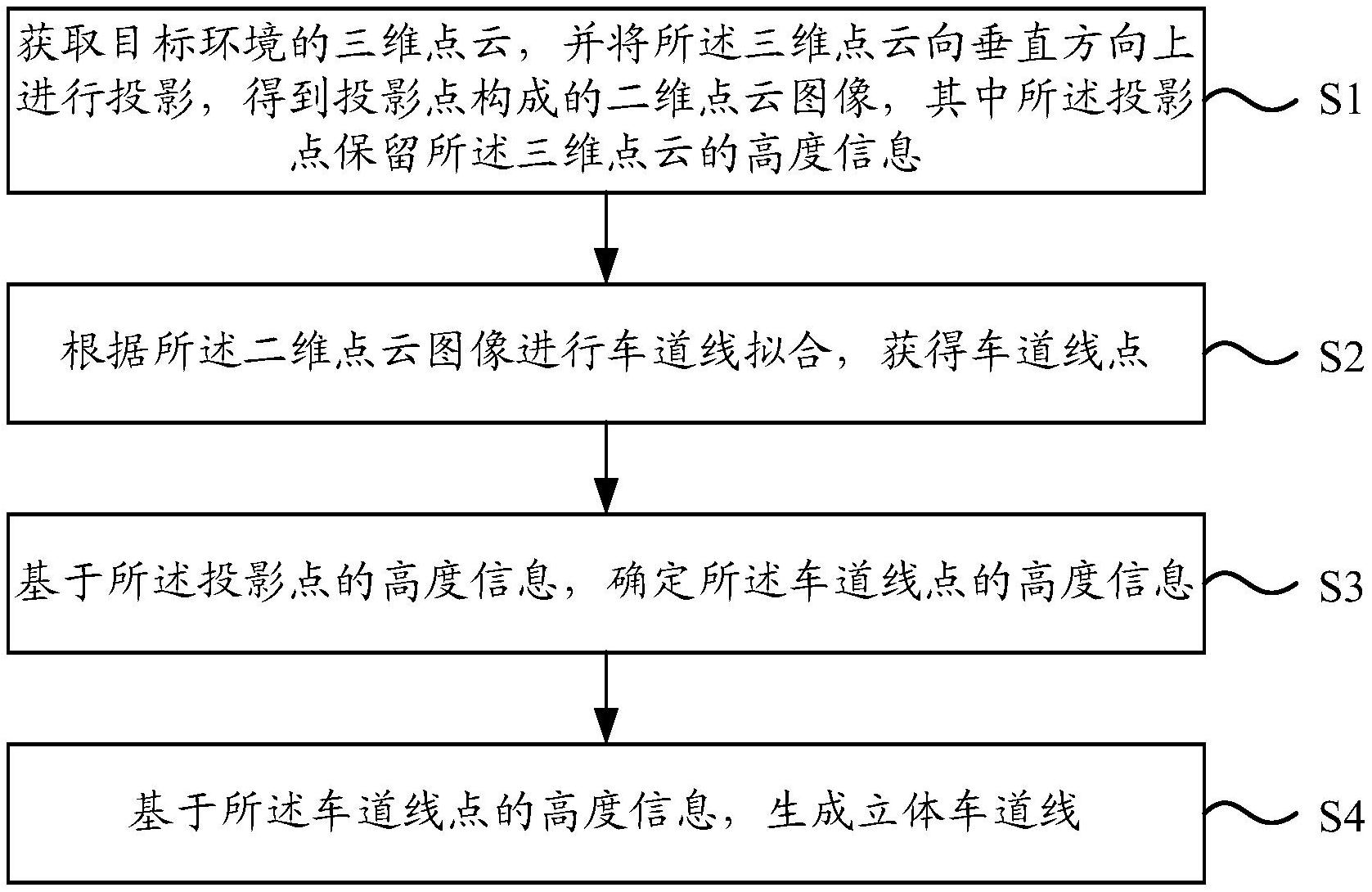
立体车道线确定方法,包括:获取目标环境的三维点云,并将所述三维点云向垂直方向上进行投影,得到投影点构成的二维点云图像,其中所述投影点保留所述三维点云的高度信息(S1);根据所述二维点云图像进行车道线拟合,获得车道线点(S2);基于所述投影点的高度信息,确定所述车道线点的高度信息(S3);基于所述车道线点的高度信息,生成立体车道线(S4)。由于将三维点云向垂直方向上进行投影,得到投影点构成的二维点云图像保留了三维点云的高度信息,从而根据二维点云图像进行车道线拟合获得的车道线点,也具有高度信息,而基于高度信息则可以区分位于不同高度的车道线,进而将车道线点整合为立体车道线。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有