

授权公布号:CN217513870U
一种机械手的取料抓手结构
有效
申请
2022-04-29
申请公布
1970-01-01
授权
2022-09-30
预估到期
2032-04-29
| 申请号 | CN202221025424.X |
| 申请日 | 2022-04-29 |
| 授权公布号 | CN217513870U |
| 授权公告日 | 2022-09-30 |
| 分类号 | B25J5/02;B25J9/14;B25J9/12;B25J19/00 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 上海鲍麦克斯电子科技有限公司 |
| 申请人地址 | 上海市浦东新区中国(上海)自由贸易试验区郭守敬路498号14幢22301-103座 |
专利法律状态
2022-09-30
授权
状态信息
授权
2022-04-29
公布
状态信息
公布
摘要
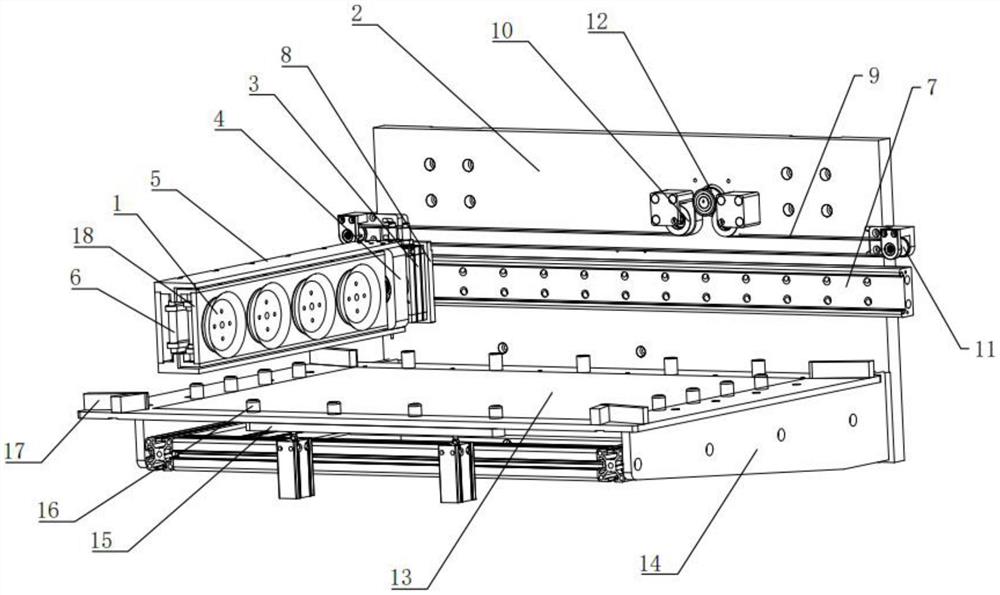
本实用新型公开了一种机械手的取料抓手结构,涉及到抓手结构的技术领域,包括:固定装置的一侧设有固定板,固定板上设有同步装置,同步装置的下侧设有滑动装置,滑动装置上可滑动地设有机械臂旋转抓手,机械臂旋转抓手的一侧设有连接板,连接板上设有若干吸盘;机械臂旋转抓手包括旋转气缸、旋转支架、第一安装板及伸缩链组件,滑动装置上可滑动地设有旋转气缸,旋转气缸远离滑动装置的一侧依次设有旋转支架及第一安装板,第一安装板上开设有安装槽,安装槽的槽口处可滑动地设有连接板,安装槽内设有伸缩链组件。通过设置机械臂旋转抓手,在机械臂旋转抓手上设有吸盘,从而实现机械手旋转取放物料,使用非常方便。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有