

授权公布号:CN111843120B
基于电弧传感和位置前馈的机器人焊缝跟踪算法
有效
申请
2020-08-07
申请公布
2020-10-30
授权
2022-01-07
预估到期
2040-08-07
| 申请号 | CN202010787820.5 |
| 申请日 | 2020-08-07 |
| 申请公布号 | CN111843120A |
| 申请公布日 | 2020-10-30 |
| 授权公布号 | CN111843120B |
| 授权公告日 | 2022-01-07 |
| 分类号 | B23K9/127 |
| 分类 | 机床;不包含在其他类目中的金属加工; |
| 申请人名称 | 北京时代科技股份有限公司 |
| 申请人地址 | 北京市海淀区上地信息产业基地开拓路17号 |
专利法律状态
2022-01-07
授权
状态信息
授权
2020-11-17
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B23K9/127;申请日:20200807
2020-10-30
公布
状态信息
公布
摘要
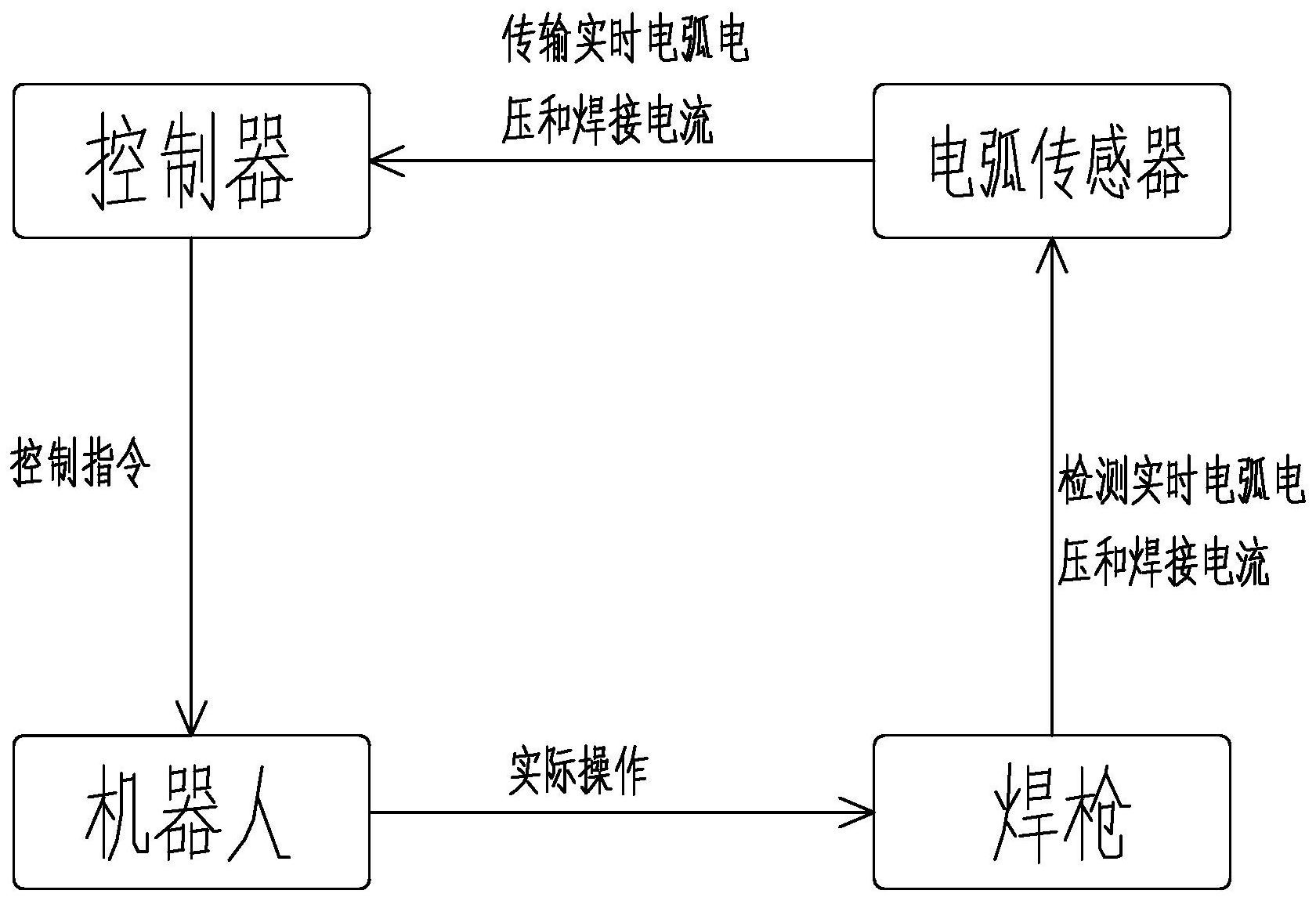
基于电弧传感和位置前馈的机器人焊缝跟踪算法,所述跟踪算法包括以下步骤:控制器将标准焊接曲线输入机器人,机器人带动焊枪沿标准焊接曲线路径向前运动的同时还使焊枪沿垂直焊缝的方向进行摆动;接收电弧传感器在焊枪沿垂直焊缝的方向摆动过程中的测量得到的实时电弧电压和焊接电流;根据接收的实时电弧电压和焊接电流来计算焊接回路的实时阻抗值;对实时阻抗值进行积分,以获取左右阻抗差值和高低阻抗差值;对左右阻抗差值和高低阻抗差值进行处理,分别乘以一个系数以获取左右偏差调整值和高低偏差调整值。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有