

授权公布号:CN111536979B
一种基于随机优化的无人机巡检路径规划方法
有效
申请
2020-07-08
申请公布
2020-08-14
授权
2020-10-30
预估到期
2040-07-08
| 申请号 | CN202010652557.9 |
| 申请日 | 2020-07-08 |
| 申请公布号 | CN111536979A |
| 申请公布日 | 2020-08-14 |
| 授权公布号 | CN111536979B |
| 授权公告日 | 2020-10-30 |
| 分类号 | G01C21/20 |
| 分类 | 测量;测试; |
| 申请人名称 | 浙江省能源集团有限公司 |
| 申请人地址 | 浙江省杭州市滨江区滨盛路1751号 |
专利法律状态
2024-01-19
专利申请权、专利权的转移
状态信息
专利权的转移;IPC(主分类):G01C 21/20;专利号:ZL2020106525579;登记生效日:20240103;变更事项:专利权人;变更前权利人:浙江浙能天然气运行有限公司;变更后权利人:国家管网集团浙江省天然气管网有限公司;变更事项:地址;变更前权利人:310052 浙江省杭州市滨江区滨盛路1751号浙能二厦;变更后权利人:310000 浙江省杭州市滨江区滨盛路1751号;变更事项:专利权人;变更前权利人:浙江省能源集团有限公司 浙江大学;变更后权利人:浙江省能源集团有限公司 浙江大学
2020-10-30
授权
状态信息
授权
2020-09-08
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G01C21/20;申请日:20200708
2020-08-14
公布
状态信息
公布
摘要
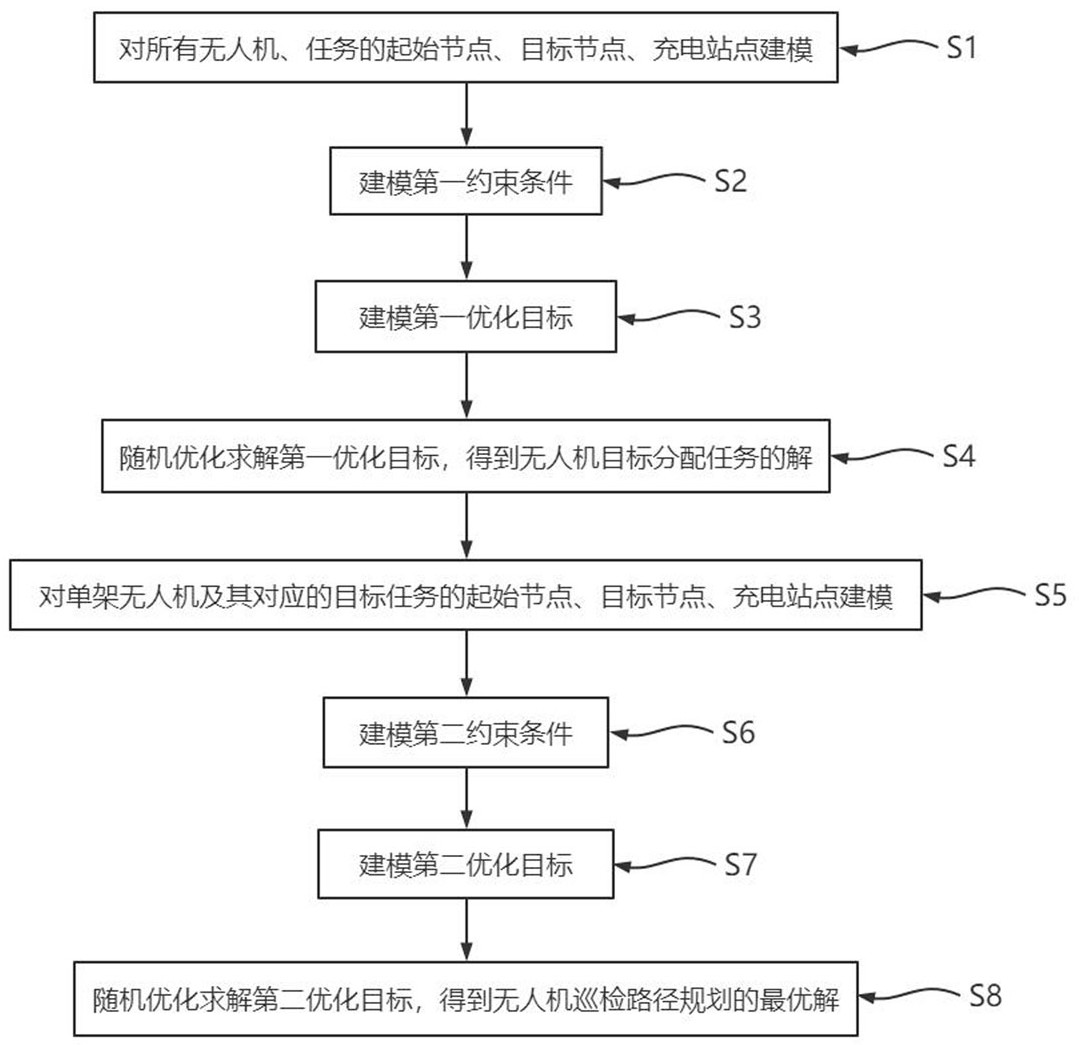
本发明涉及一种基于随机优化的无人机巡检路径规划方法,包括:S1、对所有无人机、任务的起始节点、目标节点、充电站点建模;S2、建模第一约束条件;S3、建模第一优化目标;S4、随机优化求解第一优化目标,得到无人机目标分配任务的解;S5、对单架无人机及其对应的目标任务的起始节点、目标节点、充电站点建模;S6、建模第二约束条件,包括:环境约束、最大飞行距离约束、最大转弯角约束、转弯调整距离约束;其中,最大飞行距离约束考虑无人机在充电站点充电后飞行距离复原;S7、建模第二优化目标,包括路径航程代价函数;S8、随机优化求解第二优化目标,得到无人机巡检路径规划的最优解。本发明保证无人机更高效的任务执行。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有