

授权公布号:CN112485806B
一种激光雷达和相机时间同步系统及方法
有效
申请
2020-09-27
申请公布
2021-03-12
授权
2023-12-05
预估到期
2040-09-27
| 申请号 | CN202011032785.2 |
| 申请日 | 2020-09-27 |
| 申请公布号 | CN112485806A |
| 申请公布日 | 2021-03-12 |
| 授权公布号 | CN112485806B |
| 授权公告日 | 2023-12-05 |
| 分类号 | G01S17/86;G01S7/48 |
| 分类 | 测量;测试; |
| 申请人名称 | 浙江众合科技股份有限公司 |
| 申请人地址 | 浙江省杭州市滨江区江汉路1785号双城国际4号楼17层 |
专利法律状态
2023-12-05
授权
状态信息
授权
2021-06-15
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G01S17/86;申请日:20200927
2021-03-12
公布
状态信息
公布
摘要
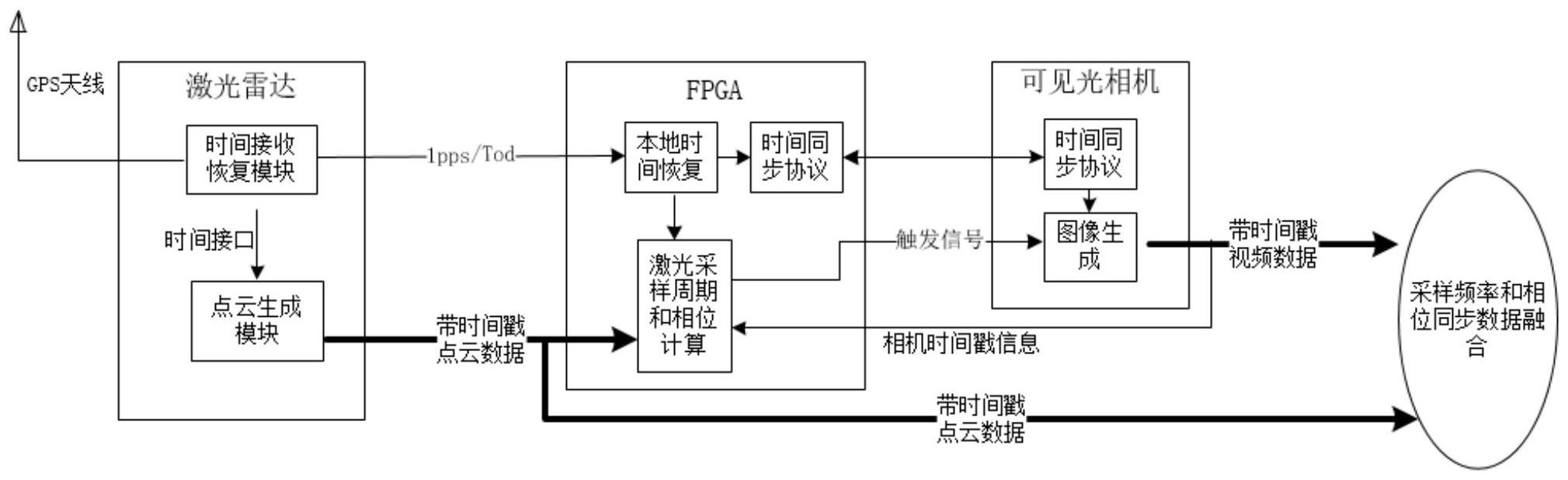
本发明公开了一种激光雷达和相机时间同步系统及方法,激光雷达设有时间接收恢复模块和点云生成模块,时间接收恢复模块接收卫星授时信号,恢复出标准时间,点云生成模块根据标准时间生成并向可编程逻辑器件输出带时间戳的激光点云数据;可见光相机设有时间同步协议模块一和图像生成模块,图像生成模块根据触发信号完成图像采集和输出,且图像输出带有时间戳;还包括可编程逻辑器件,可编程逻辑器件设有本地时间恢复模块、时间同步协议模块二、激光采样周期和相位计算模块。本发明不仅实现了激光雷达、可编程逻辑器件以及可见光相机的时间同步,而且完成了激光点云数据和图像数据的频率和相位同步,提高了数据融合质量。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有