

授权公布号:CN112951029B
一种驾培机器人踏板操作检测装置和车辆
有效
申请
2021-01-22
申请公布
2021-06-11
授权
2023-05-05
预估到期
2041-01-22
| 申请号 | CN202110088575.3 |
| 申请日 | 2021-01-22 |
| 申请公布号 | CN112951029A |
| 申请公布日 | 2021-06-11 |
| 授权公布号 | CN112951029B |
| 授权公告日 | 2023-05-05 |
| 分类号 | G09B9/04;G09B9/052 |
| 分类 | 教育;密码术;显示;广告;印鉴; |
| 申请人名称 | 武汉木仓科技股份有限公司 |
| 申请人地址 | 湖北省武汉市东湖新技术开发区关山大道332号保利国际中心第31层03号 |
专利法律状态
2023-05-05
授权
状态信息
授权
2021-06-11
公布
状态信息
公布
摘要
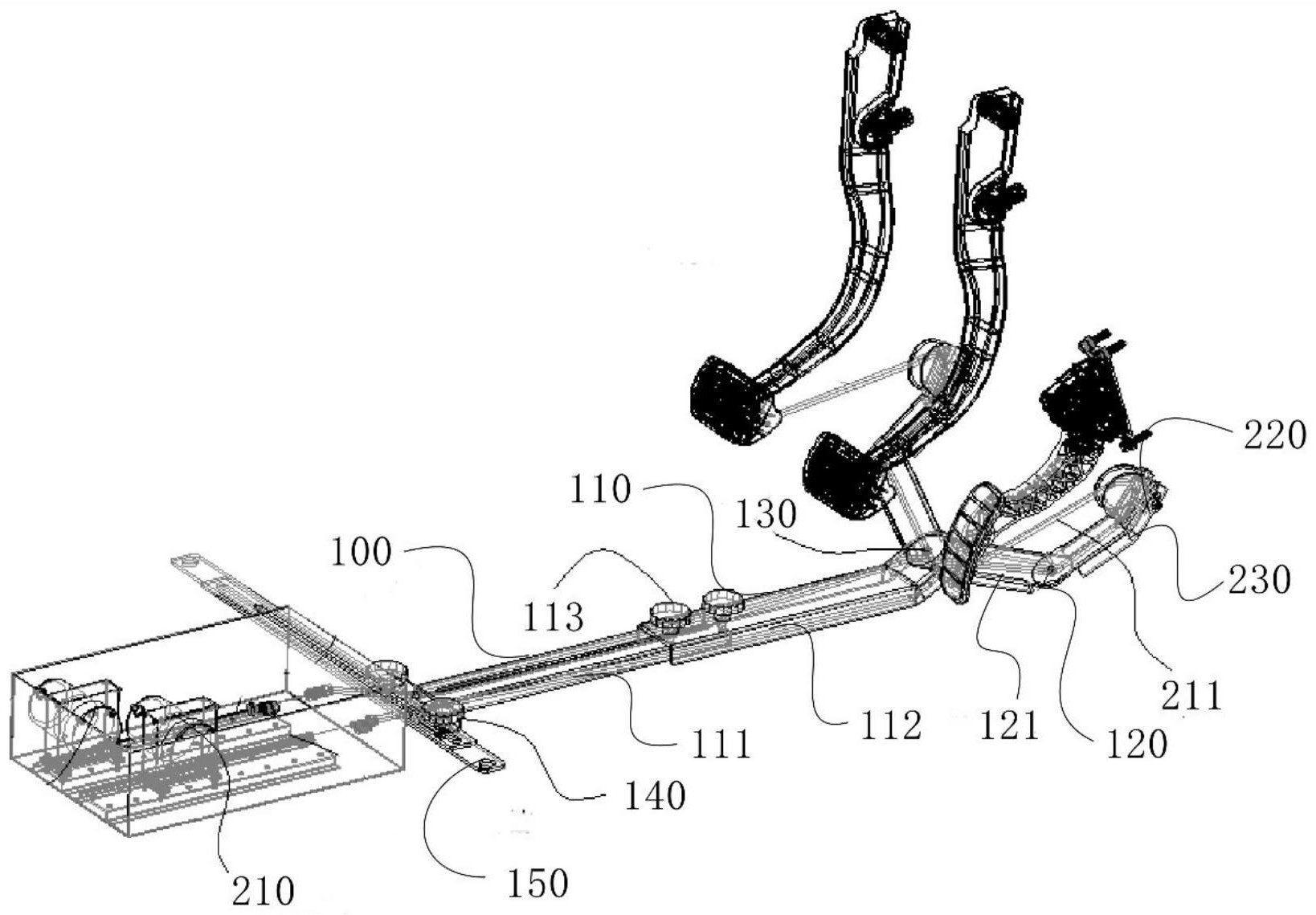
本发明涉及驾培机器人技术领域,具体涉及一种驾培机器人踏板操作检测装置和车辆。该装置包括:拉绳走线槽和至少一组检测单元;检测单元包括拉绳位移传感器、拉绳换向结构和换向支架;拉绳换向结构与换向支架连接,用以改变拉绳位移传感器的拉绳的方向。本发明设置了至少一组检测单元,每一组检测单元可以对应一个车辆踏板,其中每一组检测单元均设有拉绳位移传感器,拉绳位移传感器的拉绳能够穿设于拉绳走线槽中,并能够经拉绳换向结构的转向连接对应踏板远离驾驶座位的一侧,减少了拉绳对驾驶员驾驶车辆的影响以及驾驶员对踏板操作检测精度的影响,从而在无法通过OBD接口采集驾驶人的踏板操作信息的车辆中实现了驾培机器人踏板操作检测功能。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有