

授权公布号:CN106005084B
液压爬杆机器人及其工作方法
有效
申请
2016-07-12
申请公布
2016-10-12
授权
2019-01-15
预估到期
2036-07-12
| 申请号 | CN201610543474.X |
| 申请日 | 2016-07-12 |
| 申请公布号 | CN106005084A |
| 申请公布日 | 2016-10-12 |
| 授权公布号 | CN106005084B |
| 授权公告日 | 2019-01-15 |
| 分类号 | B62D57/024;F15B11/08;F15B15/14 |
| 分类 | 无轨陆用车辆; |
| 申请人名称 | 天津优瑞纳斯液压机械有限公司 |
| 申请人地址 | 天津市西青区西青经济开发区兴华二支路20号 |
专利法律状态
2019-01-15
授权
状态信息
授权
2016-11-09
实质审查的生效
状态信息
实质审查的生效IPC(主分类):B62D 57/024申请日:20160712
2016-10-12
公布
状态信息
公开
摘要
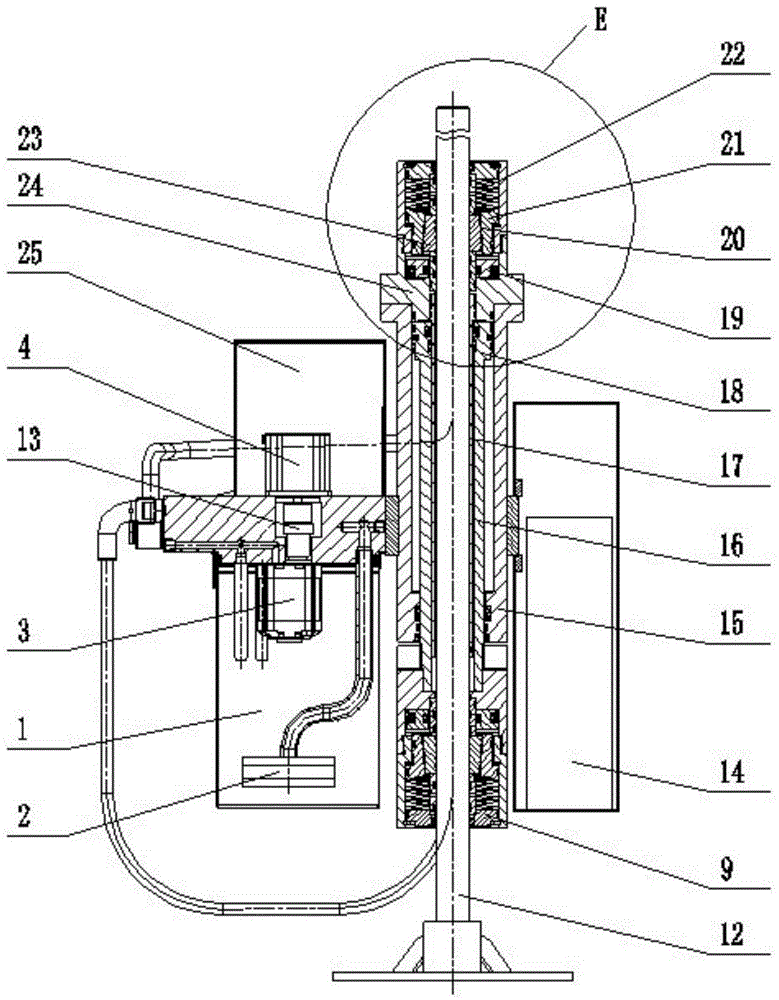
本发明涉及一种液压爬杆机器人及其工作方法,包括双作用往复液压缸、缸底夹紧器以及活塞杆夹紧器,双作用往复液压缸的底部安装有一缸底夹紧器,双作用往复液压缸的活塞杆端部安装有一活塞杆夹紧器,在缸底夹紧器、双作用往复液压缸以及活塞杆夹紧器的轴心制有一个贯通的中心孔,用于爬行的杆依次穿过缸底夹紧器、双作用往复液压缸以及活塞杆夹紧器的轴心的中心孔;双作用往复液压缸连接液压动力包。本机器人活塞杆与活塞杆夹紧器一体化设计,缸底与缸底夹紧器一体化设计,螺纹连接结构紧凑,采用楔形接触面使夹紧力成倍增加,夹紧力大。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有