

授权公布号:CN116147635B
一种应用于多轮廓传感器的处理方法
有效
申请
2023-04-17
申请公布
2023-05-23
授权
2023-07-28
预估到期
2043-04-17
| 申请号 | CN202310404312.8 |
| 申请日 | 2023-04-17 |
| 申请公布号 | CN116147635A |
| 申请公布日 | 2023-05-23 |
| 授权公布号 | CN116147635B |
| 授权公告日 | 2023-07-28 |
| 分类号 | G01C21/20;G01B11/24;G01B21/04;G01B21/20 |
| 分类 | 测量;测试; |
| 申请人名称 | 天津宜科自动化股份有限公司 |
| 申请人地址 | 天津市西青区西青经济技术开发区赛达四支路12号 |
专利法律状态
2023-09-01
专利权人的姓名或者名称、地址的变更
状态信息
专利权人的姓名或者名称、地址的变更;IPC(主分类):G01C 21/20;专利号:ZL2023104043128;变更事项:专利权人;变更前:天津宜科自动化股份有限公司;变更后:天津宜科自动化股份有限公司;变更事项:地址;变更前:300385 天津市西青区经济开发区赛达四支路12号;变更后:300385 天津市西青区西青经济技术开发区赛达四支路12号
2023-07-28
授权
状态信息
授权
2023-06-09
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G01C21/20;申请日:20230417
2023-05-23
公布
状态信息
公布
摘要
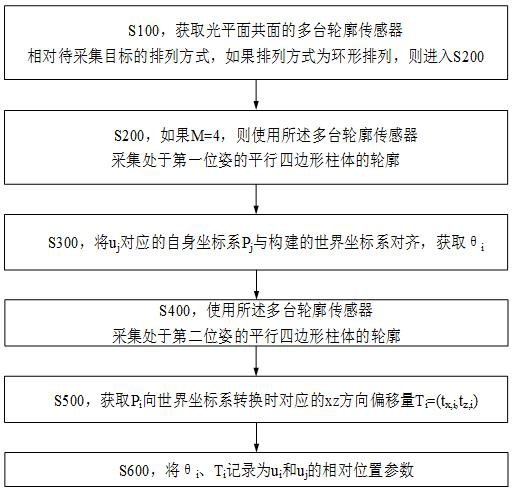
本发明涉及轮廓的计量技术领域,特别是涉及一种应用于多轮廓传感器的处理方法。所述方法包括:S100,如果光平面共面的多台轮廓传感器相对待采集目标的排列方式为环形排列,则进入S200;S200,如果M=4,则使用所述多台轮廓传感器采集处于第一位姿的平行四边形柱体的轮廓;S300,获取θi;S400,使用所述多台轮廓传感器采集处于第二位姿的平行四边形柱体的轮廓;S500,获取Pi向世界坐标系转换时对应的xz方向偏移量Ti=(tx,i,tz,i);S600,将θi、Ti记录为ui和uj的相对位置参数。本发明能够获取不同轮廓传感器之间的相对位置关系。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有