

授权公布号:CN116068567B
一种基于激光三角测距传感器的测距系统
有效
申请
2023-04-07
申请公布
2023-05-05
授权
2023-06-13
预估到期
2043-04-07
| 申请号 | CN202310363807.0 |
| 申请日 | 2023-04-07 |
| 申请公布号 | CN116068567A |
| 申请公布日 | 2023-05-05 |
| 授权公布号 | CN116068567B |
| 授权公告日 | 2023-06-13 |
| 分类号 | G01S17/08;G01S7/481 |
| 分类 | 测量;测试; |
| 申请人名称 | 天津宜科自动化股份有限公司 |
| 申请人地址 | 天津市西青区西青经济技术开发区赛达四支路12号 |
专利法律状态
2023-09-08
专利权人的姓名或者名称、地址的变更
状态信息
专利权人的姓名或者名称、地址的变更;IPC(主分类):G01S 17/08;专利号:ZL2023103638070;变更事项:专利权人;变更前:天津宜科自动化股份有限公司;变更后:天津宜科自动化股份有限公司;变更事项:地址;变更前:300385 天津市西青区经济开发区赛达四支路12号;变更后:300385 天津市西青区西青经济技术开发区赛达四支路12号
2023-06-13
授权
状态信息
授权
2023-05-23
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G01S17/08;申请日:20230407
2023-05-05
公布
状态信息
公布
摘要
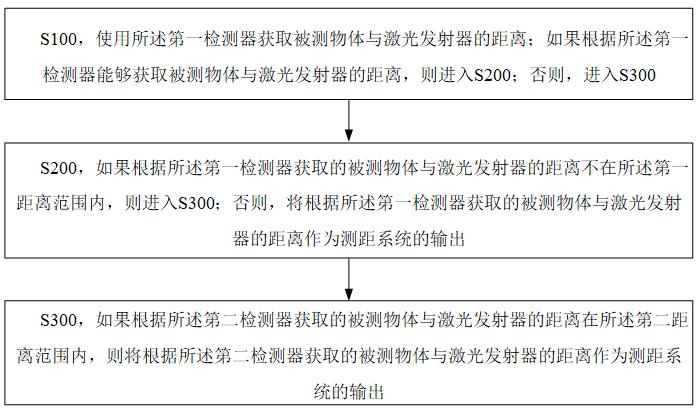
本发明涉及光学测量设备技术领域,提供了一种基于激光三角测距传感器的测距系统,包括:激光三角测距传感器、处理器和存储器,传感器包括:激光发射器、用于测量第一距离范围内的物体的第一测量机构、用于测量第二距离范围内的物体的第二测量机构,第二距离范围不等于第一距离范围;当计算机程序被处理器执行时,实现以下步骤:S100,如果根据第一检测器能够获取距离,则进入S200;否则,进入S300;S200,如果获取的距离不在第一距离范围内,则进入S300;S300,使用第二检测器获取距离,如果获取的距离在第二距离范围内,则将其作为测距系统的输出。本发明在保证测距精度要求的前提下提高了测距范围。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有