

授权公布号:CN114312202B
一种基于路况识别的半主动悬架控制方法及控制系统
有效
申请
2022-03-10
申请公布
2022-04-12
授权
2022-06-03
预估到期
2042-03-10
| 申请号 | CN202210229666.9 |
| 申请日 | 2022-03-10 |
| 申请公布号 | CN114312202A |
| 申请公布日 | 2022-04-12 |
| 授权公布号 | CN114312202B |
| 授权公告日 | 2022-06-03 |
| 分类号 | B60G17/019 |
| 分类 | 一般车辆; |
| 申请人名称 | 成都九鼎科技(集团)有限公司 |
| 申请人地址 | 四川省成都市龙泉驿区经济技术开发区航天北路118号 |
专利法律状态
2022-06-03
授权
状态信息
授权
2022-04-12
公布
状态信息
公布
摘要
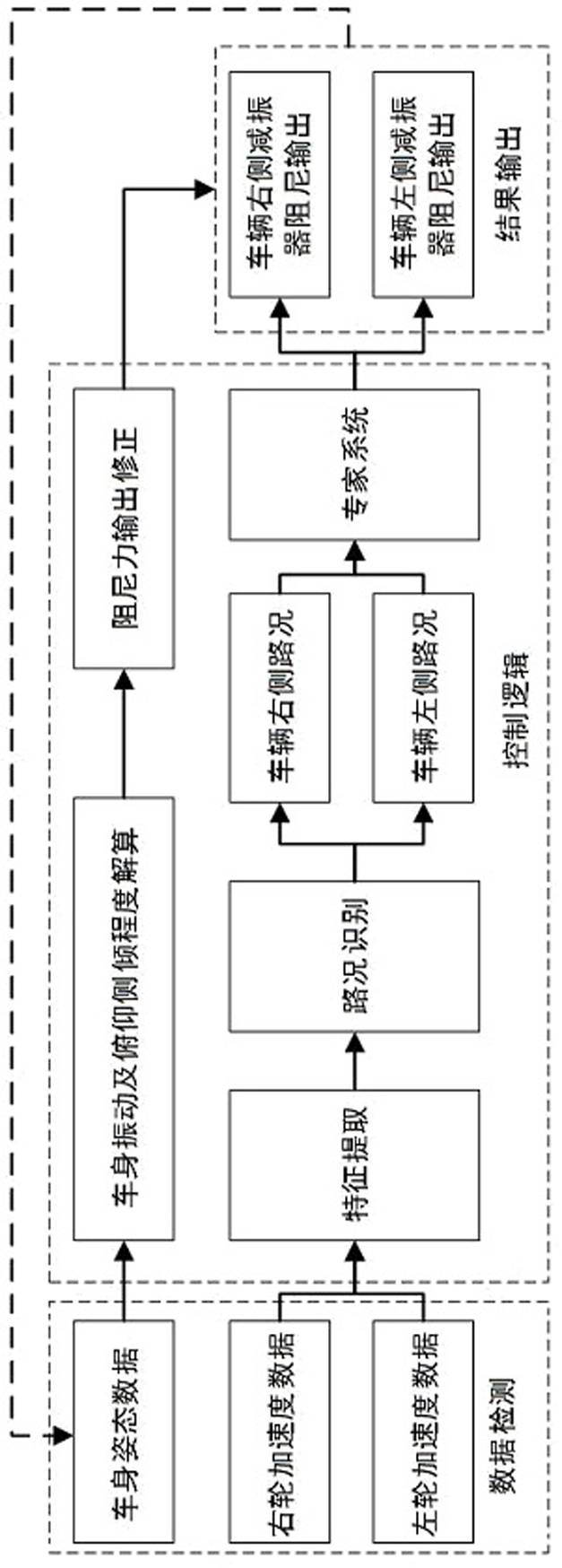
本发明提出了一种基于路况识别的半主动悬架控制方法及控制系统,针对现有半主动悬架控制方法存在的数据检测结构复杂,控制逻辑计算复杂等问题,根据路面激励振动与车身振动实时改变悬架系统阻尼,以实现车辆悬架系统在不同路况下输出合理的阻尼实现车辆的操稳和平顺性要求。而本发明仅需要两个车轮加速度传感器和1个车身传感器,整个数据检测结构大幅简化,而控制算法需要处理的数据也大幅减少,使整个系统简单化,成本降低。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有