

授权公布号:CN111376728B
基于陡坡缓降控制系统的控制方法、控制系统及电动车
有效
申请
2018-12-29
申请公布
2020-07-07
授权
2021-12-07
预估到期
2038-12-29
| 申请号 | CN201811644518.3 |
| 申请日 | 2018-12-29 |
| 申请公布号 | CN111376728A |
| 申请公布日 | 2020-07-07 |
| 授权公布号 | CN111376728B |
| 授权公告日 | 2021-12-07 |
| 分类号 | B60L7/00;B60L7/10;B60T8/32 |
| 分类 | 一般车辆; |
| 申请人名称 | 比亚迪汽车工业有限公司 |
| 申请人地址 | 广东省深圳市坪山新区坪山街道比亚迪路3001、3007、3009号 |
专利法律状态
2021-12-07
授权
状态信息
授权
2020-07-31
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B60L7/00;申请日:20181229
2020-07-07
公布
状态信息
公布
摘要
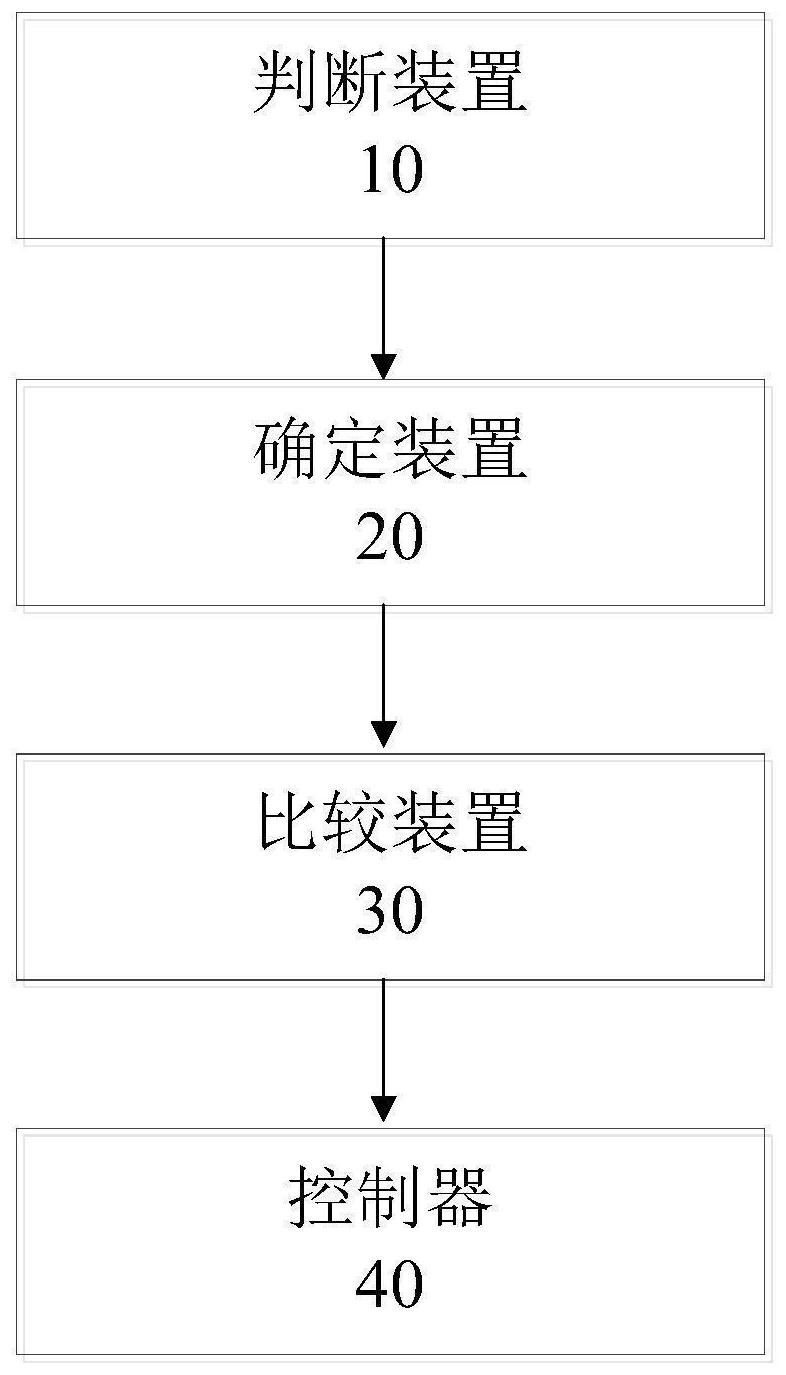
本发明涉及电机控制领域,公开一种基于陡坡缓降控制(HDC)系统的控制方法、HDC系统及电动车。该控制方法包括:判断HDC系统状态;在HDC系统处于触发状态情况下,基于电动车当前车速及目标车速,确定目标制动力矩;比较目标制动力矩与电机当前最大制动力矩;及根据比较结果,控制电动车通过电机回馈制动模式或电机回馈与液压混合制动模式进行制动,在满足触发条件情况下,确定HDC系统处于触发状态:HDC系统处于待命状态;及油门踏板与制动踏板的深度信号为0、车速处于预设速度范围且电动车处于加速下坡状态。该控制方法不需坡度传感器采集坡度,从而可防止因坡度传感器所采集的信号异常而导致HDC功能异常,大大提高制动系统稳定性及整车制动安全性。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有