

授权公布号:CN108957495B
GNSS与MIMU组合导航方法、装置及计算机设备
有效
申请
2018-05-03
申请公布
2018-12-07
授权
2020-12-29
预估到期
2038-05-03
| 申请号 | CN201810415245.9 |
| 申请日 | 2018-05-03 |
| 申请公布号 | CN108957495A |
| 申请公布日 | 2018-12-07 |
| 授权公布号 | CN108957495B |
| 授权公告日 | 2020-12-29 |
| 分类号 | G01S19/40;G01S19/47 |
| 分类 | 测量;测试; |
| 申请人名称 | 广州中海达卫星导航技术股份有限公司 |
| 申请人地址 | 广东省广州市番禺区东环街番禺大道北555号天安总部中心13号厂房101 |
专利法律状态
2020-12-29
授权
状态信息
授权
2019-01-01
实质审查的生效
状态信息
实质审查的生效IPC(主分类):G01S 19/40
2018-12-07
公布
状态信息
公布
摘要
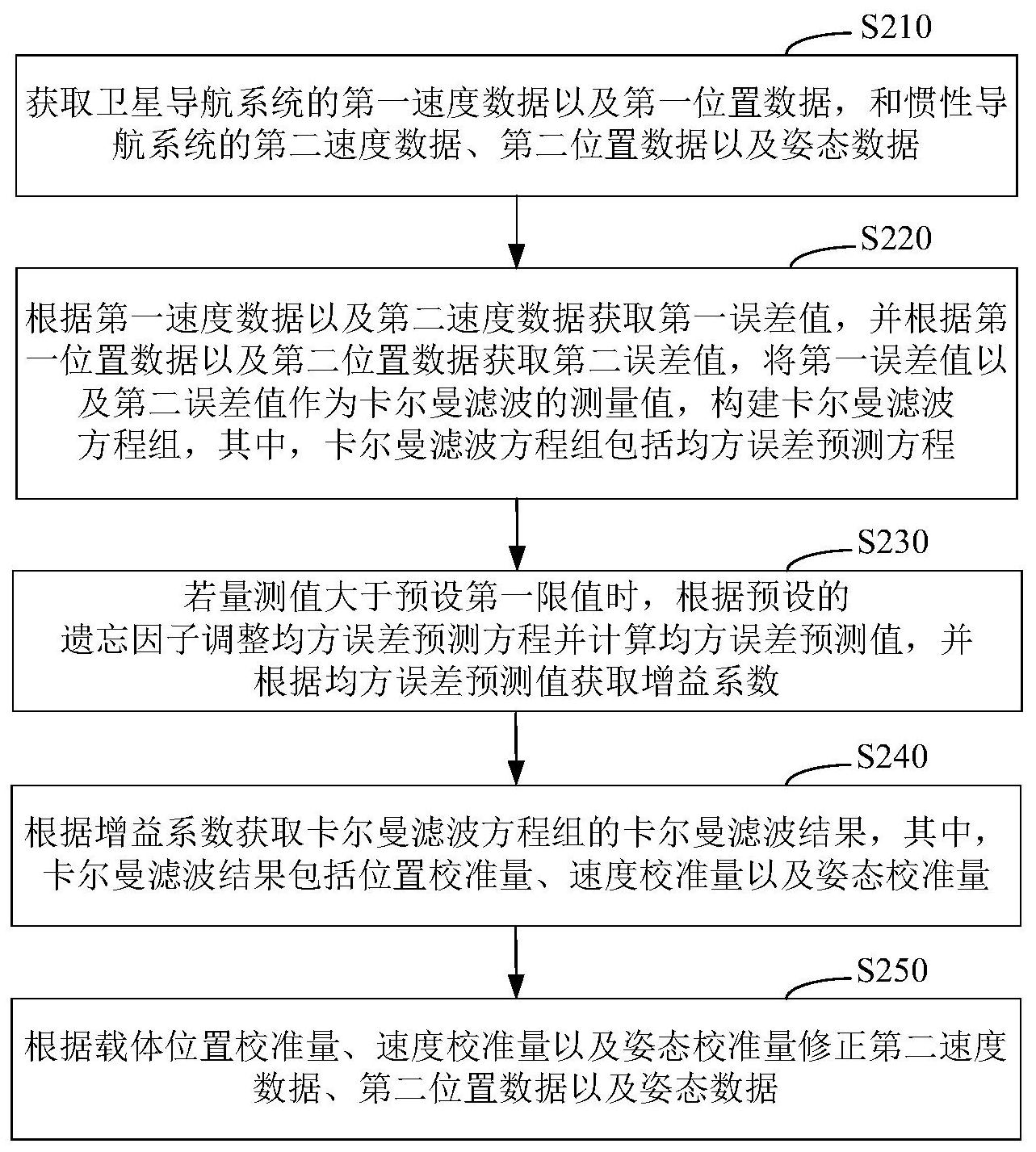
本申请涉及一种GNSS与MIMU组合导航方法、系统、计算机设备和存储介质。方法包括:获取卫星导航系统的速度数据以及位置数据,和惯性导航系统的速度数据以及位置数据;根据卫星导航系统与惯性导航系统间速度数据的误差值以及位置数据的误差值,构建卡尔曼滤波方程组;若量测值大于预设第一限值时,根据预设的遗忘因子调整卡尔曼滤波方程组中的均方误差预测方程并计算均方误差预测值,获取增益系数;根据增益系数获取卡尔曼滤波方程组的卡尔曼滤波结果,从而修正第二速度数据、第二位置数据以及惯性导航系统的姿态数据。采用本方法能够减少惯性导航系统中惯性器件的量测数据的偏差对导航结果的影响,提高组合导航在振动条件下解算的导航结果的精确性。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有