

授权公布号:CN108584826B
一种绝缘高空作业车及其臂架缓冲控制方法
有效
申请
2018-06-19
申请公布
2018-09-28
授权
2023-05-30
预估到期
2038-06-19
| 申请号 | CN201810630000.8 |
| 申请日 | 2018-06-19 |
| 申请公布号 | CN108584826A |
| 申请公布日 | 2018-09-28 |
| 授权公布号 | CN108584826B |
| 授权公告日 | 2023-05-30 |
| 分类号 | B66F11/04;F15B19/00;F15B21/06 |
| 分类 | 卷扬;提升;牵引; |
| 申请人名称 | 徐州海伦哲专用车辆股份有限公司 |
| 申请人地址 | 江苏省徐州市徐州经济技术开发区宝莲寺路19号 |
专利法律状态
2023-05-30
授权
状态信息
授权
2018-10-26
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B66F 11/04;专利申请号:2018106300008;申请日:20180619
2018-09-28
公布
状态信息
公布
摘要
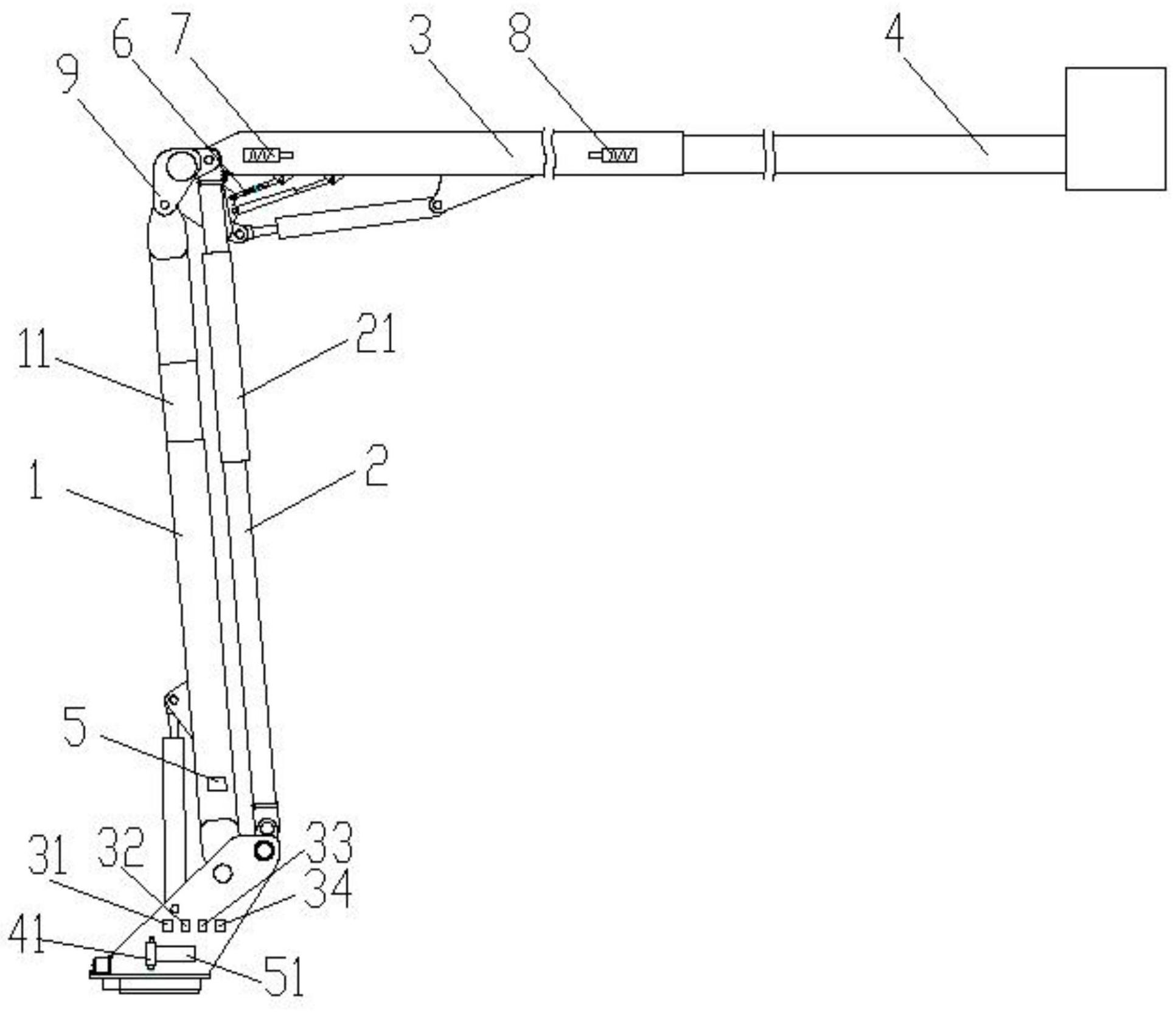
本发明公开了一种绝缘高空作业车及其臂架缓冲控制方法,绝缘高空作业车包括臂架缓冲动作控制装置,臂架缓冲动作控制装置包括下臂倾角检测传感器、上臂变幅缓冲控制检测缸、伸缩臂回缩缓冲控制检测缸、伸缩臂伸出缓冲控制检测缸、压力检测传感器、流量及换向控制电磁阀、自复位切换开关和电控机构;本臂架缓冲控制方法通过对臂架液压驱动动作流量大小的控制实现对臂架动作速度快慢的控制,可以无需在上臂部分上布设电器元件的前提下实现对臂架动作的有效缓冲控制,进而实现保证整车的动作平稳性、防止绝缘作业平台因驱动油缸动作至极限位置时的瞬间紧急停止造成的大幅度往复摆动,从而便于操作人员准确控制身体与带电体之间的距离、降低安全隐患。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有