

授权公布号:CN111830953B
车辆自定位方法、装置及系统
有效
申请
2019-04-12
申请公布
2020-10-27
授权
2024-03-12
预估到期
2039-04-12
| 申请号 | CN201910295101.9 |
| 申请日 | 2019-04-12 |
| 申请公布号 | CN111830953A |
| 申请公布日 | 2020-10-27 |
| 授权公布号 | CN111830953B |
| 授权公告日 | 2024-03-12 |
| 分类号 | G05D1/43;G05D1/242;G05D1/243;G05D1/246;G05D1/65;G05D1/661;G05D1/644;G05D1/648;G05D109/10N |
| 分类 | 控制;调节; |
| 申请人名称 | 北京四维图新科技股份有限公司 |
| 申请人地址 | 北京市海淀区丰豪东路四维图新大厦A座10层 |
专利法律状态
2024-03-12
授权
状态信息
授权
2020-11-13
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G05D1/02;申请日:20190412
2020-10-27
公布
状态信息
公布
摘要
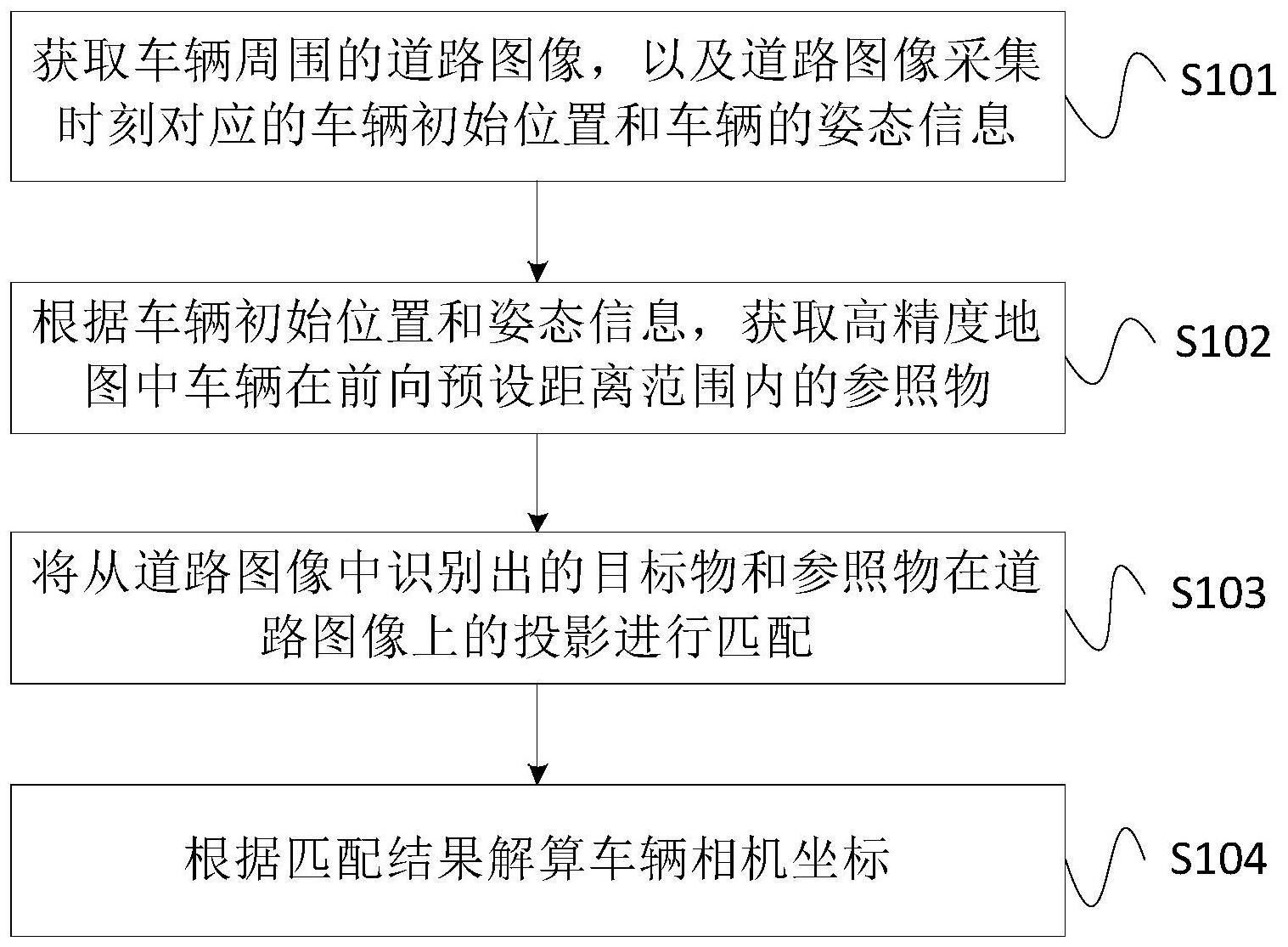
本发明提供一种车辆自定位方法、装置及系统,该方法,包括:获取车辆周围的道路图像,以及道路图像采集时刻对应的车辆初始位置和车辆的姿态信息;获取高精度地图中车辆在前向预设距离范围内的参照物;将从所述道路图像中识别出的目标物和所述参照物在道路图像上的投影进行匹配;根据匹配结果解算车辆相机坐标;其中,所述车辆相机坐标用以表征所述车辆的位置,车辆相机安装在车辆的预设位置。本发明可以仅依赖单目相机完成对环境的感知,并将感知的目标物直接与高精度地图中参照物从3D到2D的映射点做匹配,快速实现车辆的自定位,在保证定位精度的前提下,极大地降低了硬件成本。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有