

授权公布号:CN217028307U
一种汽车搬运机器人的抱夹装置
有效
申请
2022-03-09
申请公布
1970-01-01
授权
2022-07-22
预估到期
2032-03-09
| 申请号 | CN202220504234.X |
| 申请日 | 2022-03-09 |
| 授权公布号 | CN217028307U |
| 授权公告日 | 2022-07-22 |
| 分类号 | E04H6/18;E04H6/42 |
| 分类 | 建筑物; |
| 申请人名称 | 唐山通宝停车设备有限公司 |
| 申请人地址 | 河北省唐山市丰润区公园道162号 |
专利法律状态
2022-07-22
授权
状态信息
授权
摘要
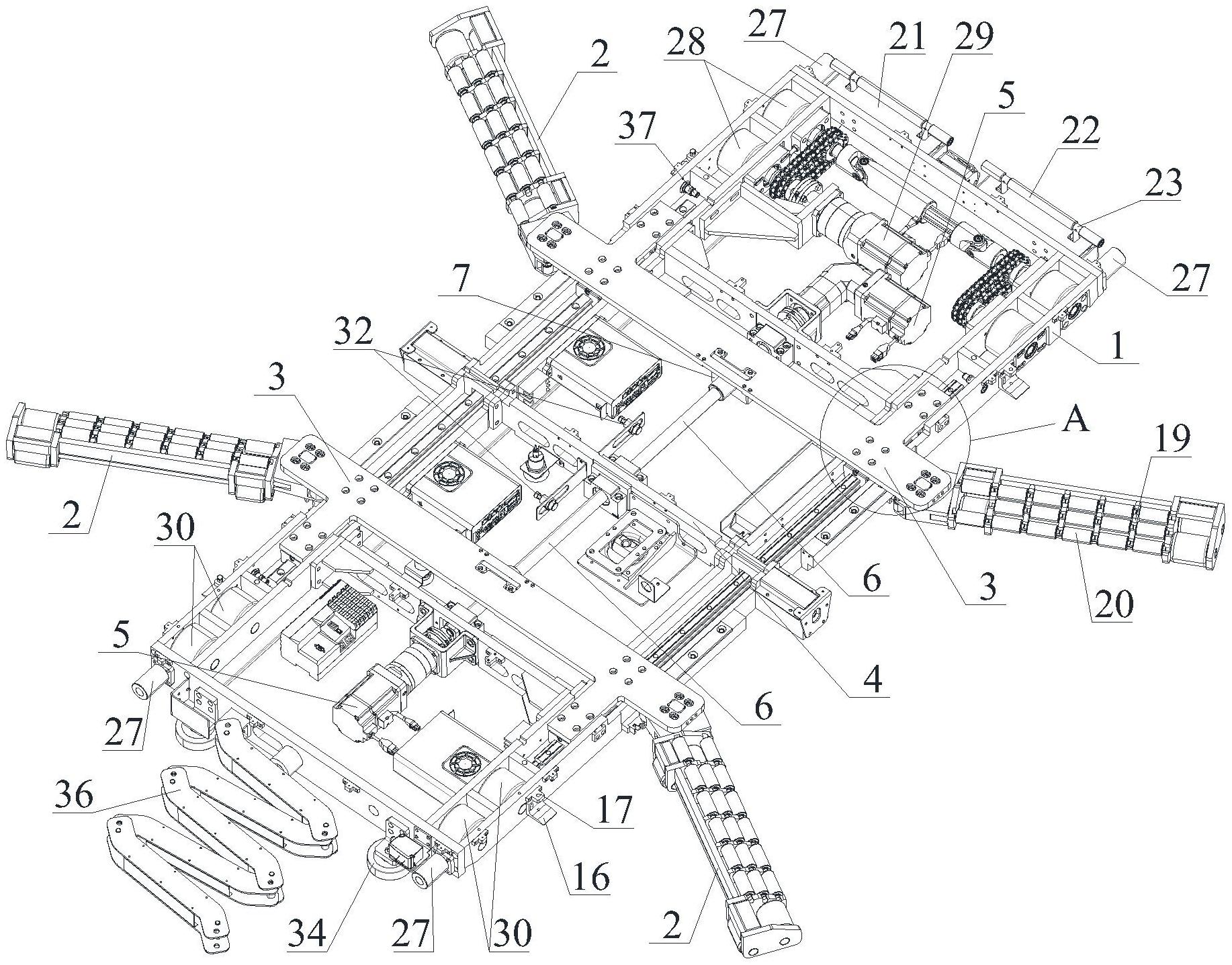
本实用新型涉及立体停车设备技术领域,提出了一种汽车搬运机器人的抱夹装置,包括底盘、夹持机构、夹持驱动机构,夹持机构包括滑动座、以及夹臂,滑动座包括前后两个夹臂驱动板,每个夹臂驱动板的左右两端都连接有夹臂,抱夹装置还包括定位板,夹持驱动机构包括前后两个夹持驱动装置、以及连接在每个夹持驱动装置与定位板之间的传动杆,每个传动杆都与定位板形成转动配合且每个传动杆上都螺纹连接有连接座,每个连接座都是与位于其上方的夹臂驱动板固定连接,夹臂驱动板借助传动杆的旋转具有靠近或远离定位板的水平移动自由度。解决了相关技术中每个夹持机构与夹持驱动机构之间都需要借助传动机构来实现连接,结构比较复杂,成本较高的问题。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有