

授权公布号:CN109343530B
一种AGV搬运机器人
有效
申请
2018-11-02
申请公布
2019-02-15
授权
2022-01-25
预估到期
2038-11-02
| 申请号 | CN201811301139.4 |
| 申请日 | 2018-11-02 |
| 申请公布号 | CN109343530A |
| 申请公布日 | 2019-02-15 |
| 授权公布号 | CN109343530B |
| 授权公告日 | 2022-01-25 |
| 分类号 | G05D1/02;G05D1/03;H04W4/024;H04W4/40 |
| 分类 | 控制;调节; |
| 申请人名称 | 北京悦畅科技有限公司 |
| 申请人地址 | 北京市朝阳区黄木厂路1号恒润商务中心4层、6层 |
专利法律状态
2022-01-25
授权
状态信息
授权
2019-02-15
公布
状态信息
公布
摘要
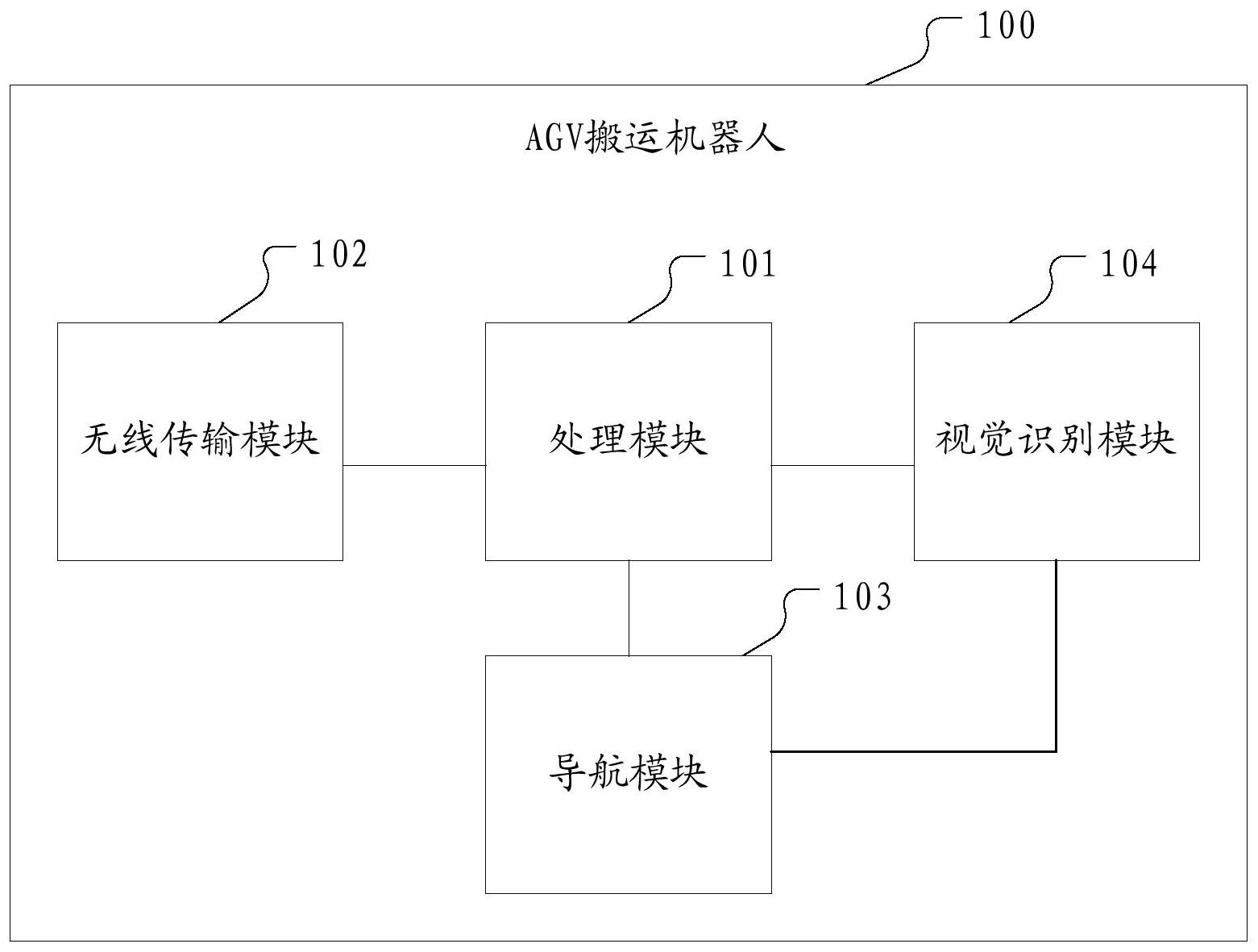
本发明公开了一种AGV搬运机器人,包括:无线传输模块,用于接收停车场系统在待停车辆停放到指定区域并触发自动泊车时发送的自动泊车指令,将自动泊车指令发送给处理模块;处理模块通知导航模块进行导航;导航模块根据预存的停车场地图,生成第一导航路径,以及生成以指定区域为起点,以停车场内立体车库的空闲车位为终点的第二导航路径;视觉识别模块,在AGV搬运机器人行驶的过程中同步拍摄周围环境以辅助导航;处理模块,收到导航模块发送的导航完毕指令后收控制AGV搬运机器人将待停车辆停泊在立体车库的空闲车位上。本发明实施例的机器人不仅可应用于平面车位,也可以应用于多层自动立体车库,扩大了AGV搬运机器人的应用范围。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有