

授权公布号:CN117208333B
多臂协作打包机器人的控制方法
有效
申请
2023-11-07
申请公布
2023-12-12
授权
2024-01-23
预估到期
2043-11-07
| 申请号 | CN202311466710.9 |
| 申请日 | 2023-11-07 |
| 申请公布号 | CN117208333A |
| 申请公布日 | 2023-12-12 |
| 授权公布号 | CN117208333B |
| 授权公告日 | 2024-01-23 |
| 分类号 | B65B57/00;B65B65/00;B65B35/16;B65B57/04;B65B11/48;B65B51/06;B65C9/46;B65C9/08;B65C9/26 |
| 分类 | 输送;包装;贮存;搬运薄的或细丝状材料; |
| 申请人名称 | 山东新华医疗器械股份有限公司 |
| 申请人地址 | 山东省淄博市高新区泰美路7号新华医疗科技园 |
专利法律状态
2024-01-23
授权
状态信息
授权
2023-12-29
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B65B57/00;申请日:20231107
2023-12-12
公布
状态信息
公布
摘要
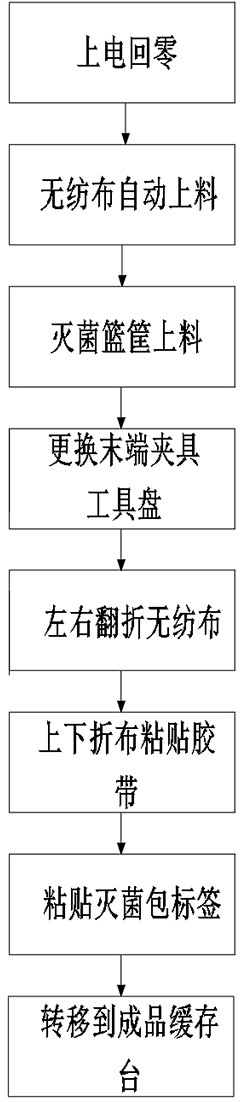
本发明公开了多臂协作打包机器人的控制方法,它属于医疗器械领域,其以解决现有技术中灭菌物品打包过程繁琐,操作人员的劳动强度大、效率低的问题。它主要包括初次上电回零;无纺布自动上料;灭菌托盘上料;更换末端夹具工具盘;左右翻折无纺布;上下折布粘贴胶带;粘贴灭菌包标签;转移到成品缓存台。本发明主要使用了三台六自由度机械臂以及众多的检测和执行元器件,可以完全代替手术器械灭菌包的人员自动的完成打包,自动化程度高。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有