

授权公布号:CN115649733B
一种多工位高精度伺服下料装置
有效
申请
2022-12-29
申请公布
2023-01-31
授权
2023-03-28
预估到期
2042-12-29
| 申请号 | CN202211702341.4 |
| 申请日 | 2022-12-29 |
| 申请公布号 | CN115649733A |
| 申请公布日 | 2023-01-31 |
| 授权公布号 | CN115649733B |
| 授权公告日 | 2023-03-28 |
| 分类号 | B65G11/02;B65G11/20;B07B13/04 |
| 分类 | 输送;包装;贮存;搬运薄的或细丝状材料; |
| 申请人名称 | 合肥合锻智能制造股份有限公司 |
| 申请人地址 | 安徽省合肥市经济技术开发区紫云路123号 |
专利法律状态
2023-03-28
授权
状态信息
授权
2023-01-31
公布
状态信息
公布
摘要
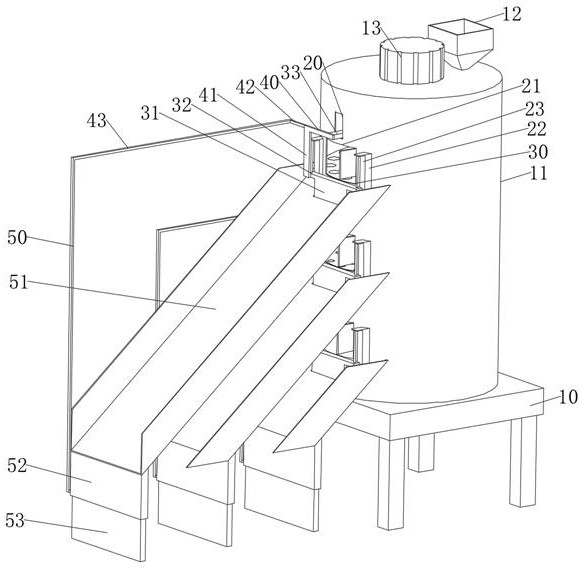
本发明涉及货物卸料设备技术领域,且公开了一种多工位高精度伺服下料装置包括支撑支架和分拣筒,所述的分拣筒装配有分拣盘,分拣盘设置有筛孔,分拣筒装配有牵引电机,牵引电机装配有转动杆,转动杆与分拣盘装配,分拣筒的内部顶面和分拣盘的底部装配有装配杆,装配杆装配有限位板,限位板与转动杆装配,转动杆设置有外螺纹,外螺纹装配有螺纹套筒,螺纹套筒装配杆装配,上述一种多工位高精度伺服下料装置通过螺纹套筒和分拣盘的配合解决了现有的卸料装置无法根据不同型号大小的货物进行分拣卸料,增加操作难度和操作时间,提高人工成本的问题。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有