

授权公布号:CN114019971B
一种无人设备控制方法、装置、存储介质及电子设备
有效
申请
2021-11-04
申请公布
2022-02-08
授权
2024-03-26
预估到期
2041-11-04
| 申请号 | CN202111298666.6 |
| 申请日 | 2021-11-04 |
| 申请公布号 | CN114019971A |
| 申请公布日 | 2022-02-08 |
| 授权公布号 | CN114019971B |
| 授权公告日 | 2024-03-26 |
| 分类号 | G05D1/43;G05D1/65;G05D1/633;G05D1/644;G05D1/247;G05D1/648;G05D105/22N |
| 分类 | 控制;调节; |
| 申请人名称 | 北京三快在线科技有限公司 |
| 申请人地址 | 北京市海淀区北四环西路9号2106-030 |
专利法律状态
2024-03-26
授权
状态信息
授权
2022-02-08
公布
状态信息
公布
摘要
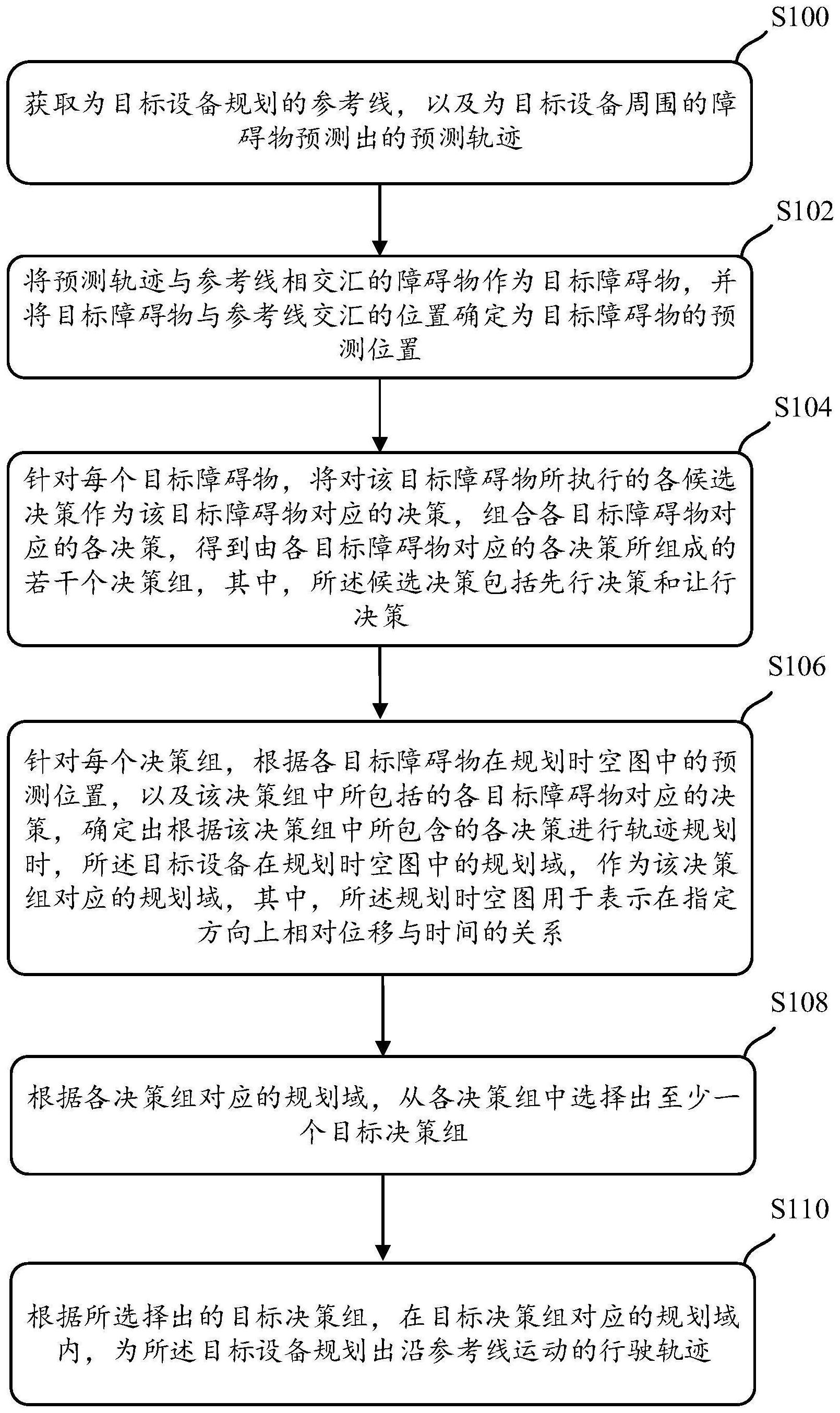
本说明书公开了一种无人设备控制方法、装置、存储介质及电子设备,可以应用于无人驾驶设备。先从障碍物中选择出预测轨迹与目标设备的规划路径相交汇的目标障碍物,再对与目标设备存在碰撞风险的各目标障碍物所执行的先行决策或让行决策进行组合得到若干个决策组,基于决策组中各目标障碍物的预测轨迹与规划路径相交汇的预测位置,以及各目标障碍物对应的决策,确定在执行决策组中各决策时目标设备在规划时空图中的规划域,并根据规划域选择出目标决策组,以在目标决策组对应的规划域内规划目标设备的行驶轨迹,以实现目标设备沿基于上述方法所规划出的行驶轨迹行驶时,对目标设备与目标障碍物之间原本可能发生的碰撞进行避免。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有