

授权公布号:CN106022274B
一种避障方法、避障装置及无人驾驶机器
有效
申请
2016-05-24
申请公布
2016-10-12
授权
2024-01-12
预估到期
2036-05-24
| 申请号 | CN201610349880.2 |
| 申请日 | 2016-05-24 |
| 申请公布号 | CN106022274A |
| 申请公布日 | 2016-10-12 |
| 授权公布号 | CN106022274B |
| 授权公告日 | 2024-01-12 |
| 分类号 | G06V20/58;G01S13/931;G01S17/931;G05D1/43;G05D1/622 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 零度智控(北京)智能科技有限公司 |
| 申请人地址 | 北京市海淀区东北旺西路8号中关村软件园9号楼203 |
专利法律状态
2024-01-12
授权
状态信息
授权
2016-11-09
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G06K9/00;申请日:20160524
2016-10-12
公布
状态信息
公布
摘要
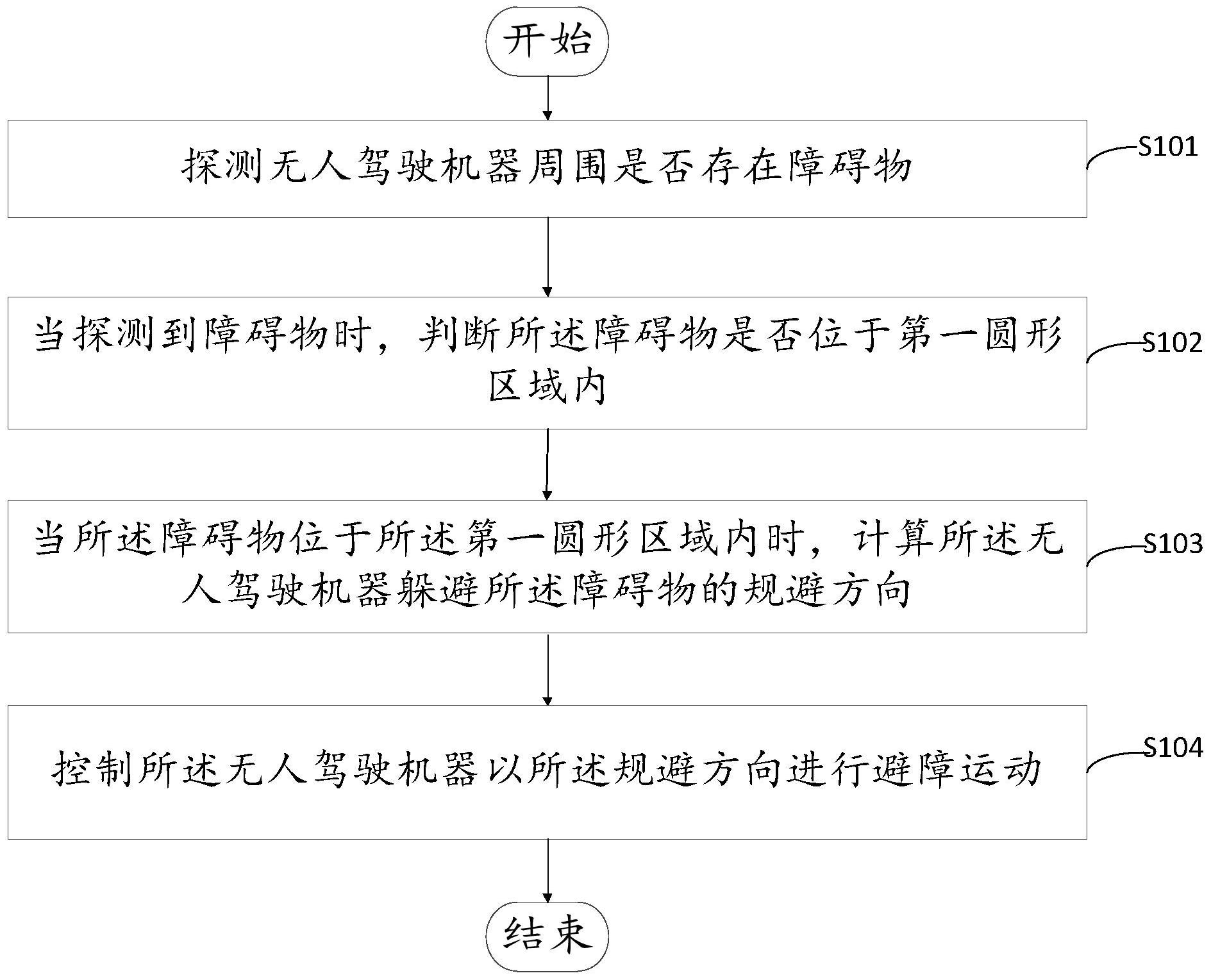
本发明提供了一种避障方法、避障装置及无人驾驶机器,该方法包括:探测所述无人驾驶机器周围是否存在障碍物;当探测到障碍物时,判断所述障碍物是否位于第一圆形区域内;当所述障碍物位于所述第一圆形区域内时,计算所述无人驾驶机器躲避所述障碍物的规避方向;及控制所述无人驾驶机器以所述规避方向进行避障运动,另外还在规避方向的计算中设定了第二圆形区域。通过设定第一圆形区域和第二圆形区域,在检测到障碍物位于第一圆形区域内时进行规避方向计算,规避方向是依据障碍物的边缘位置点和第二圆形区域的几何运算进行的,运算量小,系统负荷低,运算资源消耗少,能实时快速的计算得到可行的规避方向,实现无人驾驶机器自主避障和全方位避障。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有