

授权公布号:CN108345251B
机器人感知数据的处理方法、系统、设备及介质
有效
申请
2018-03-23
申请公布
2018-07-31
授权
2020-10-13
预估到期
2038-03-23
| 申请号 | CN201810247150.0 |
| 申请日 | 2018-03-23 |
| 申请公布号 | CN108345251A |
| 申请公布日 | 2018-07-31 |
| 授权公布号 | CN108345251B |
| 授权公告日 | 2020-10-13 |
| 分类号 | G05B19/042 |
| 分类 | 控制;调节; |
| 申请人名称 | 苏州狗尾草智能科技有限公司 |
| 申请人地址 | 江苏省苏州市姑苏区人民路239号39幢301室 |
专利法律状态
2022-04-01
专利权的保全及其解除
状态信息
专利权的保全;IPC(主分类):G05B19/042;申请日:20180323;授权公告日:20201013;登记生效日:20220228
2020-10-13
授权
状态信息
授权
2019-07-09
著录事项变更
状态信息
著录事项变更;IPC(主分类):G05B19/042;变更事项:申请人;变更前:深圳狗尾草智能科技有限公司;变更后:苏州狗尾草智能科技有限公司;变更事项:地址;变更前:518000 广东省深圳市南山区粤海街道科苑路16号东方科技大厦1307-09;变更后:215000 江苏省苏州市姑苏区人民路239号39幢301室
2018-08-24
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G05B19/042;申请日:20180323
2018-07-31
公布
状态信息
公布
摘要
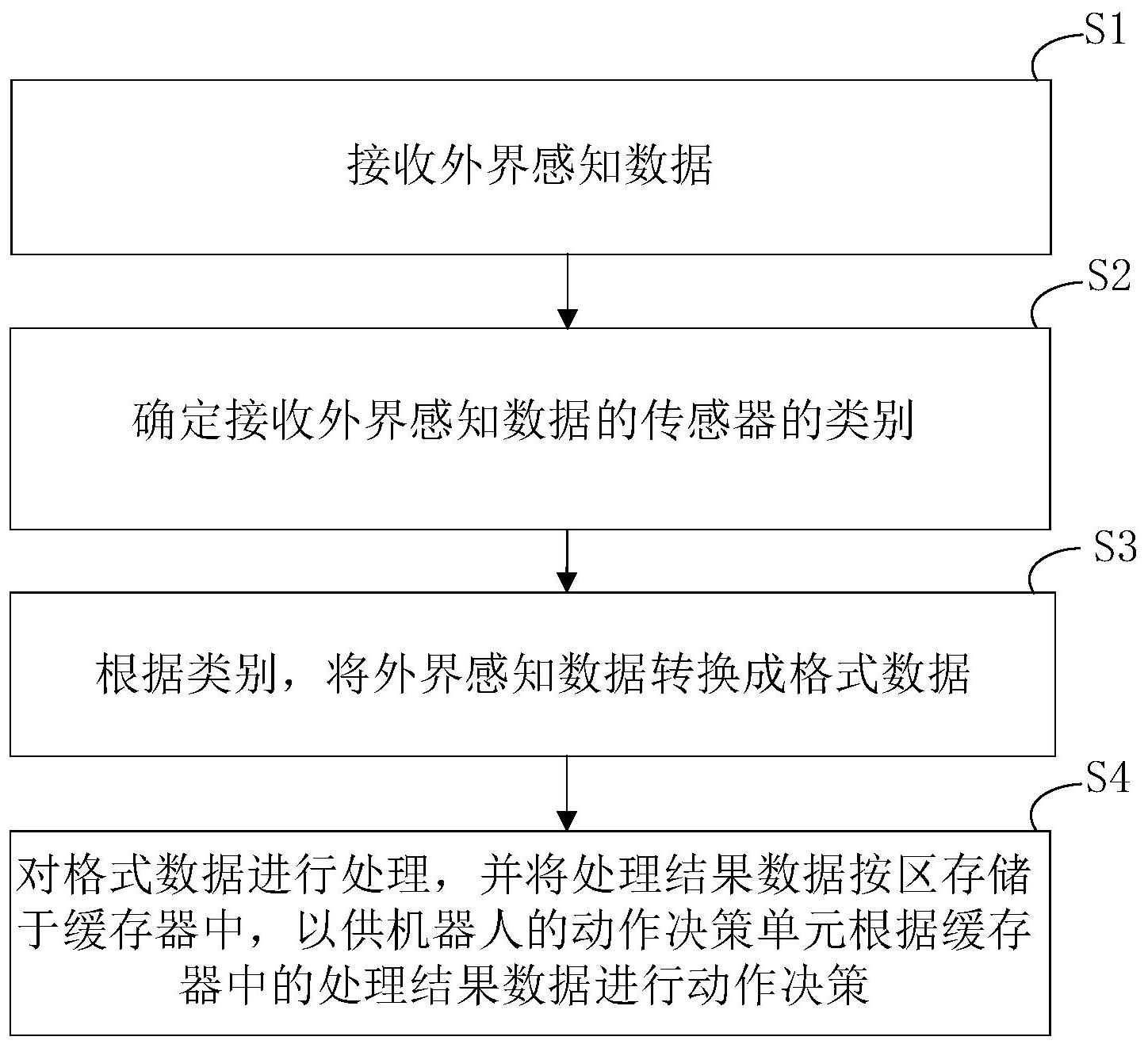
本发明提供一种机器人感知数据的处理方法、系统、设备及介质,方法包括:接收外界感知数据;确定接收外界感知数据的传感器的类别;根据类别,将外界感知数据转换成格式数据;对格式数据进行处理,并将处理结果数据按区存储于缓存器中,以供机器人的动作决策单元根据缓存器中的处理结果数据进行动作决策。本发明提供的机器人感知数据的处理方法、系统、设备及介质,可实现提升机器人感知智能与认知智能,促进机器人具有类人智能性的发展。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有