

授权公布号:CN115631216B
一种基于多特征滤波器融合的云台目标跟踪系统和方法
有效
申请
2022-12-21
申请公布
2023-01-20
授权
2023-05-12
预估到期
2042-12-21
| 申请号 | CN202211644874.1 |
| 申请日 | 2022-12-21 |
| 申请公布号 | CN115631216A |
| 申请公布日 | 2023-01-20 |
| 授权公布号 | CN115631216B |
| 授权公告日 | 2023-05-12 |
| 分类号 | G06T7/246;G06T7/277;G06V10/774;G06V10/80 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 金城集团有限公司 |
| 申请人地址 | 江苏省南京市秦淮区中山东路518号 |
专利法律状态
2023-05-12
授权
状态信息
授权
2023-05-02
专利申请权、专利权的转移
状态信息
专利申请权的转移;IPC(主分类):G06T7/246;专利申请号:2022116448741;登记生效日:20230419;变更事项:申请人;变更前权利人:中航金城无人系统有限公司;变更后权利人:金城集团有限公司;变更事项:地址;变更前权利人:210000 江苏省南京市秦淮区龙蟠中路216号;变更后权利人:210000 江苏省南京市秦淮区中山东路518号;变更事项:申请人;变更前权利人:;变更后权利人:中航金城无人系统有限公司
2023-02-14
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G06T7/246;专利申请号:2022116448741;申请日:20221221
2023-01-20
公布
状态信息
公布
摘要
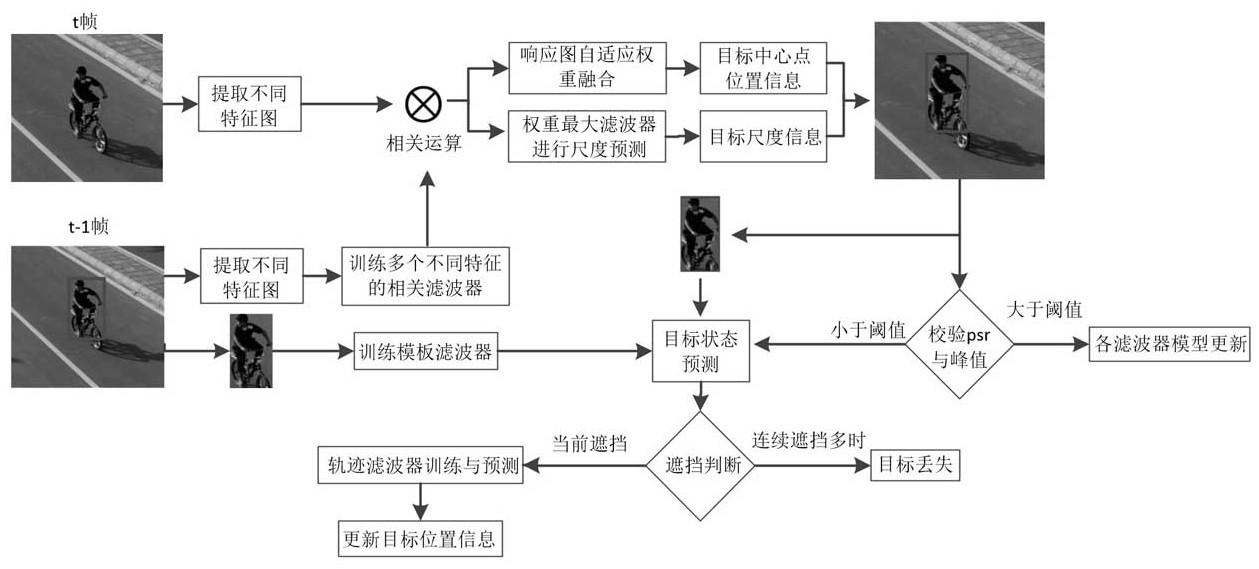
本发明公布了一种云台目标跟踪系统和方法,以不同特征来分别构建跟踪滤波器,对每个滤波器自适应分配权重,进行加权融合获得目标位置信息,然后利用权重最大的特征滤波器在不同尺度空间对目标尺度进行预测,进而获得目标准确的尺度信息,解决目标运动过程中尺度变化问题,通过设计模板滤波器和轨迹滤波器,及时输出目标被遮挡或者跟踪丢失状态信息。本发明中,所有滤波器都不以固定步长来更新,而是通过设置融合响应图的峰值和峰值旁瓣比相结合来决定滤波器更新的速率。通过本发明的多滤波器融合跟踪系统和跟踪方法能够实现云台目标跟踪,增加了目标跟踪的准确性和鲁棒性,同时能够及时输出目标的状态信息,包括正确跟踪、遮挡和丢失。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有