

授权公布号:CN114165490B
控制臂架缩回的控制方法、系统、机械设备及存储介质
有效
申请
2022-01-17
申请公布
2022-03-11
授权
2024-01-19
预估到期
2042-01-17
| 申请号 | CN202210048197.0 |
| 申请日 | 2022-01-17 |
| 申请公布号 | CN114165490A |
| 申请公布日 | 2022-03-11 |
| 授权公布号 | CN114165490B |
| 授权公告日 | 2024-01-19 |
| 分类号 | F15B11/04;F15B13/02;B66F11/04 |
| 分类 | 流体压力执行机构;一般液压技术和气动技术; |
| 申请人名称 | 湖南星邦智能装备股份有限公司 |
| 申请人地址 | 湖南省长沙市宁乡高新技术产业园区金洲大道东128号 |
专利法律状态
2024-01-19
授权
状态信息
授权
2022-03-29
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):F15B11/04;申请日:20220117
2022-03-11
公布
状态信息
公布
摘要
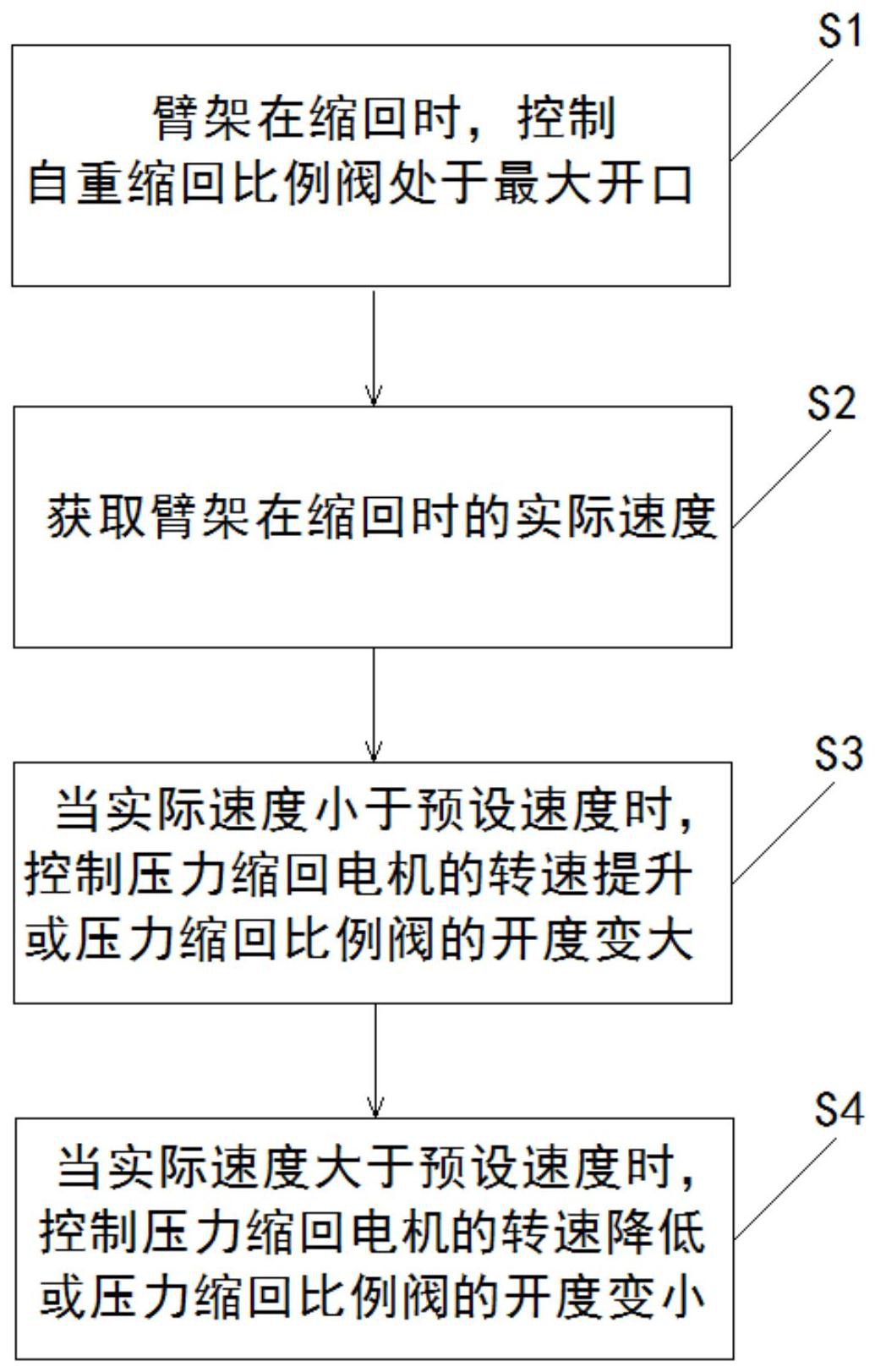
本发明公开了一种控制臂架缩回的控制方法、系统、机械设备及存储介质,控制臂架缩回的控制方法,应用于可通过臂架自重缩回和压力缩回相结合的液压系统中,液压系统包括:依次连通的压力缩回电机、压力缩回比例阀和自重缩回比例阀,臂架的无杆腔和自重缩回比例阀连通,臂架的有杆腔连通于压力缩回电机和压力缩回比例阀,控制方法包括:臂架在缩回时,控制自重缩回比例阀处于最大开口;获取臂架在缩回时的实际速度;当实际速度小于预设速度时,控制压力缩回电机的转速提升或压力缩回比例阀的开度变大;当实际速度大于预设速度时,控制压力缩回电机的转速降低或压力缩回比例阀的开度变小。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有