

授权公布号:CN108412827B
一种液压行走控制系统
有效
申请
2018-05-16
申请公布
2018-08-17
授权
2024-03-08
预估到期
2038-05-16
| 申请号 | CN201810469470.0 |
| 申请日 | 2018-05-16 |
| 申请公布号 | CN108412827A |
| 申请公布日 | 2018-08-17 |
| 授权公布号 | CN108412827B |
| 授权公告日 | 2024-03-08 |
| 分类号 | F15B11/17;F15B11/22;F15B13/02;B60W10/04 |
| 分类 | 流体压力执行机构;一般液压技术和气动技术; |
| 申请人名称 | 湖南星邦智能装备股份有限公司 |
| 申请人地址 | 湖南省长沙市宁乡高新技术产业园区金洲大道东128号 |
专利法律状态
2024-03-08
授权
状态信息
授权
2020-02-07
著录事项变更
状态信息
著录事项变更;IPC(主分类):F15B11/17;变更事项:申请人;变更前:湖南星邦重工有限公司;变更后:湖南星邦智能装备股份有限公司;变更事项:地址;变更前:410600 湖南省长沙市宁乡高新技术产业园区金洲大道东128号;变更后:410600 湖南省长沙市宁乡高新技术产业园区金洲大道东128号
2018-09-11
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):F15B11/17;申请日:20180516
2018-08-17
公布
状态信息
公布
摘要
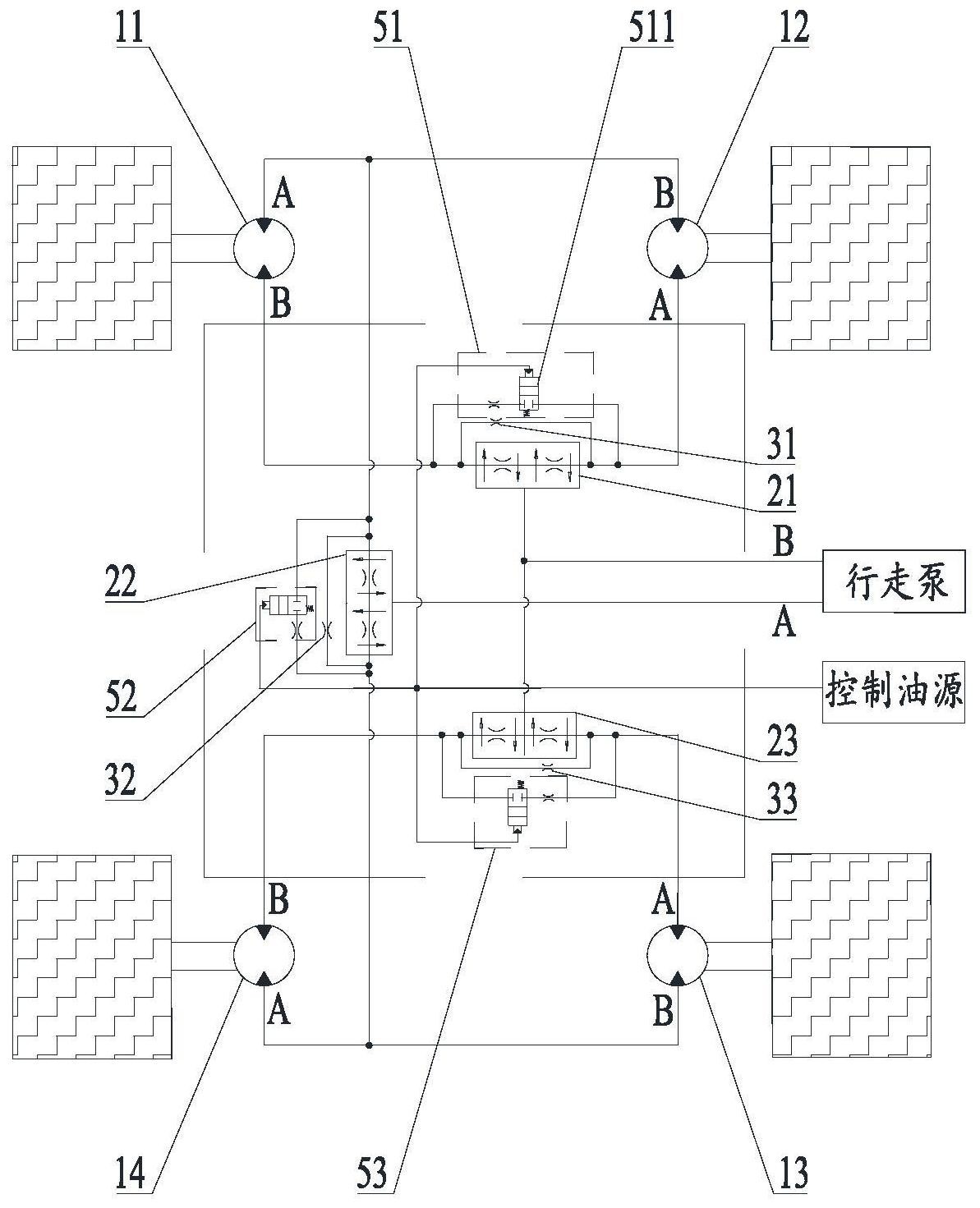
本发明公开了一种液压行走控制系统,包括行走泵、行走驱动马达组件、分流控制单元和阻尼单元,所述行走泵、分流控制单元和行走驱动马达组件依次相连;所述阻尼单元与所述分流控制单元并联,所述阻尼单元具有可切换的小阻尼输出模式和大阻尼输出模式。与现有技术相比,本发明方案的液压行走控制系统可同时兼顾大爬坡角度带来的打滑和高转弯速度带来的掉速,既提升了高速行走转向时差速效果,也提升了低速爬坡时的越野效果。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有