

授权公布号:CN113814984B
一种用于机器人放料的动态影像定位方法及系统
有效
申请
2021-10-20
申请公布
2021-12-21
授权
2023-04-18
预估到期
2041-10-20
| 申请号 | CN202111223243.8 |
| 申请日 | 2021-10-20 |
| 申请公布号 | CN113814984A |
| 申请公布日 | 2021-12-21 |
| 授权公布号 | CN113814984B |
| 授权公告日 | 2023-04-18 |
| 分类号 | B25J9/16;B25J15/06 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 环旭电子股份有限公司 |
| 申请人地址 | 上海市浦东新区张江高科技园区集成电路产业区张东路1558号 |
专利法律状态
2023-04-18
授权
状态信息
授权
2021-12-21
公布
状态信息
公布
摘要
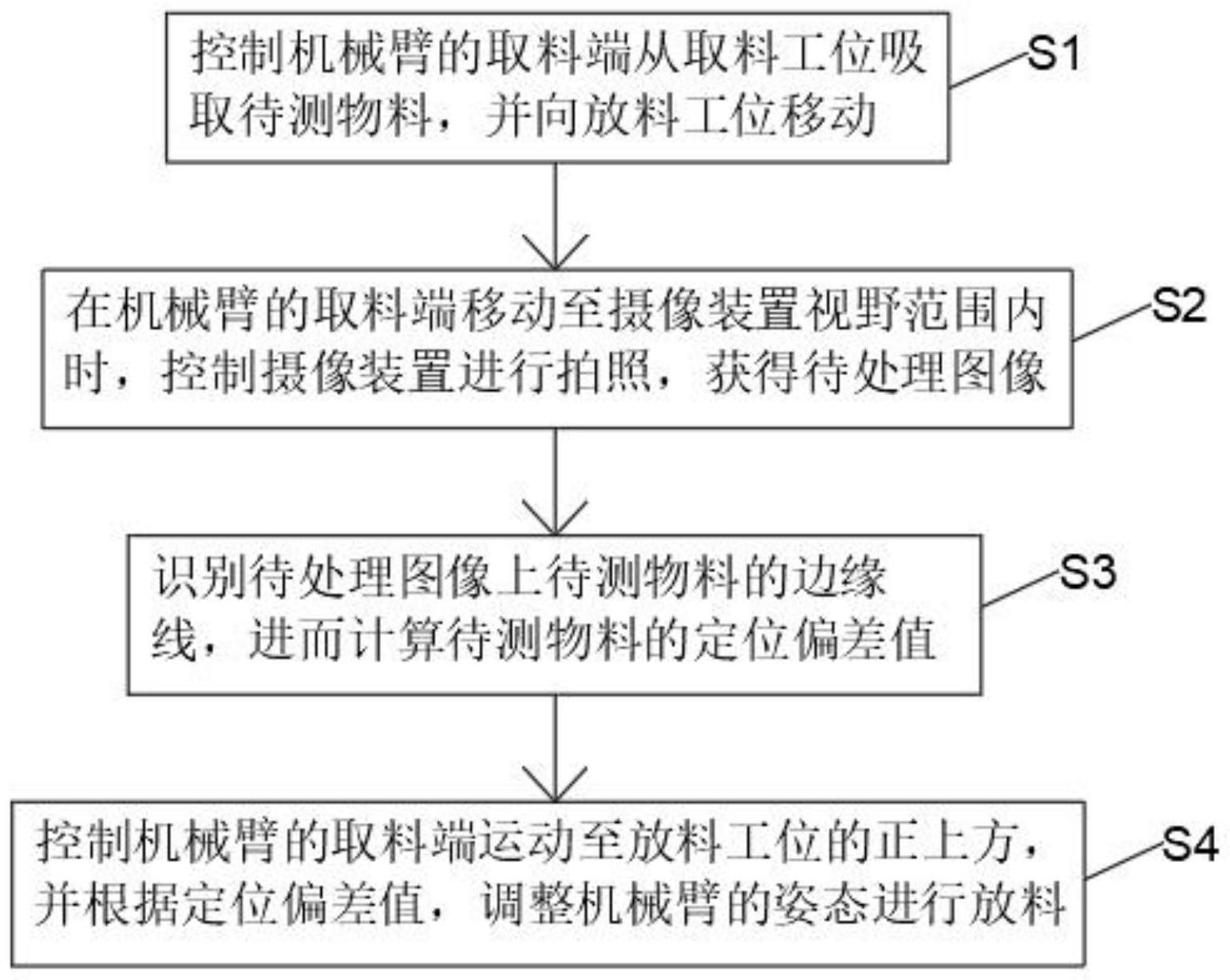
本发明提供了一种用于机器人放料的动态影像定位方法及系统,包括一在取料工位和放料工位之间往复运动的机械臂,以及一设置在所述取料工位和所述放料工位之间的摄像装置,其方法包括步骤:控制机械臂的取料端从所述取料工位吸取待测物料,并向所述放料工位移动;在机械臂的取料端移动至摄像装置视野范围内时,控制所述摄像装置进行拍照,获得待处理图像;识别所述待处理图像上所述待测物料的边缘线,进而计算所述待测物料的定位偏差值;机械臂的取料端运动至所述放料工位的正上方,根据所述定位偏差值,调整所述机械臂的姿态进行放料。该方案不需要机器人停止运动,也不需要反复测试实际拍照位置,使得机器人的定位放料效率更高、成本更低。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有