

授权公布号:CN115321445B
一种电力机器人绝缘斗臂车的控制方法
有效
申请
2022-09-05
申请公布
2022-11-11
授权
2023-09-05
预估到期
2042-09-05
| 申请号 | CN202211075958.8 |
| 申请日 | 2022-09-05 |
| 申请公布号 | CN115321445A |
| 申请公布日 | 2022-11-11 |
| 授权公布号 | CN115321445B |
| 授权公告日 | 2023-09-05 |
| 分类号 | B66F11/04;B66F17/00;B25J9/16 |
| 分类 | 卷扬;提升;牵引; |
| 申请人名称 | 杭州爱知工程车辆有限公司 |
| 申请人地址 | 浙江省杭州市钱塘区经济技术开发区5号大街17号 |
专利法律状态
2023-09-05
授权
状态信息
授权
2022-11-29
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B66F11/04;申请日:20220905
2022-11-11
公布
状态信息
公布
摘要
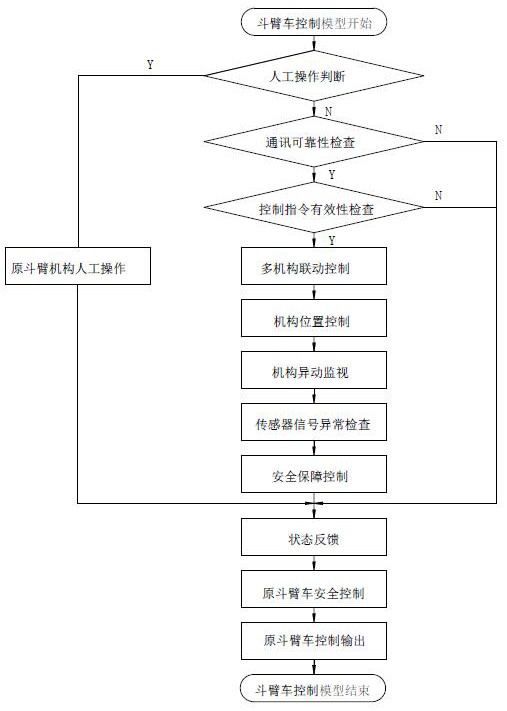
本发明涉及一种电力机器人绝缘斗臂车的控制方法,属于工程设备领域。本发明中所述回转台和支腿均安装在副大梁上,所述直伸臂安装在回转台上,所述平台摆臂安装在直伸臂上,所述平台摆动支架安装在平台摆臂上,所述平台支架安装在平台摆动支架上,所述电力机器人安装在平台支架上,所述平台高度传感器和平台摆动角度传感器均安装在平台摆动支架上,所述平台摆臂摆动角度传感器安装在平台摆臂上,所述臂长度传感器和臂角度传感器均安装在直伸臂上,所述臂回转角度传感器安装在回转台上,所述绝缘斗臂车控制器和WiFi‑CAN设备均安装在副大梁上。该绝缘斗臂车可以接收电力机器人的机构位置控制指令,绝缘斗臂车控制器可以控制各机构运动。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有