

授权公布号:CN109747431B
一种电动汽车的驻坡控制方法、系统及装置
有效
申请
2017-11-06
申请公布
2019-05-14
授权
2021-04-30
预估到期
2037-11-06
| 申请号 | CN201711078840.X |
| 申请日 | 2017-11-06 |
| 申请公布号 | CN109747431A |
| 申请公布日 | 2019-05-14 |
| 授权公布号 | CN109747431B |
| 授权公告日 | 2021-04-30 |
| 分类号 | B60L15/20;H02P3/18;H02P23/14 |
| 分类 | 一般车辆; |
| 申请人名称 | 深圳市蓝海华腾技术股份有限公司 |
| 申请人地址 | 广东省深圳市南山区西丽阳光社区新锋大楼B栋6层 |
专利法律状态
2021-04-30
授权
状态信息
授权
2019-06-07
实质审查的生效
状态信息
实质审查的生效
2019-05-14
公布
状态信息
公布
摘要
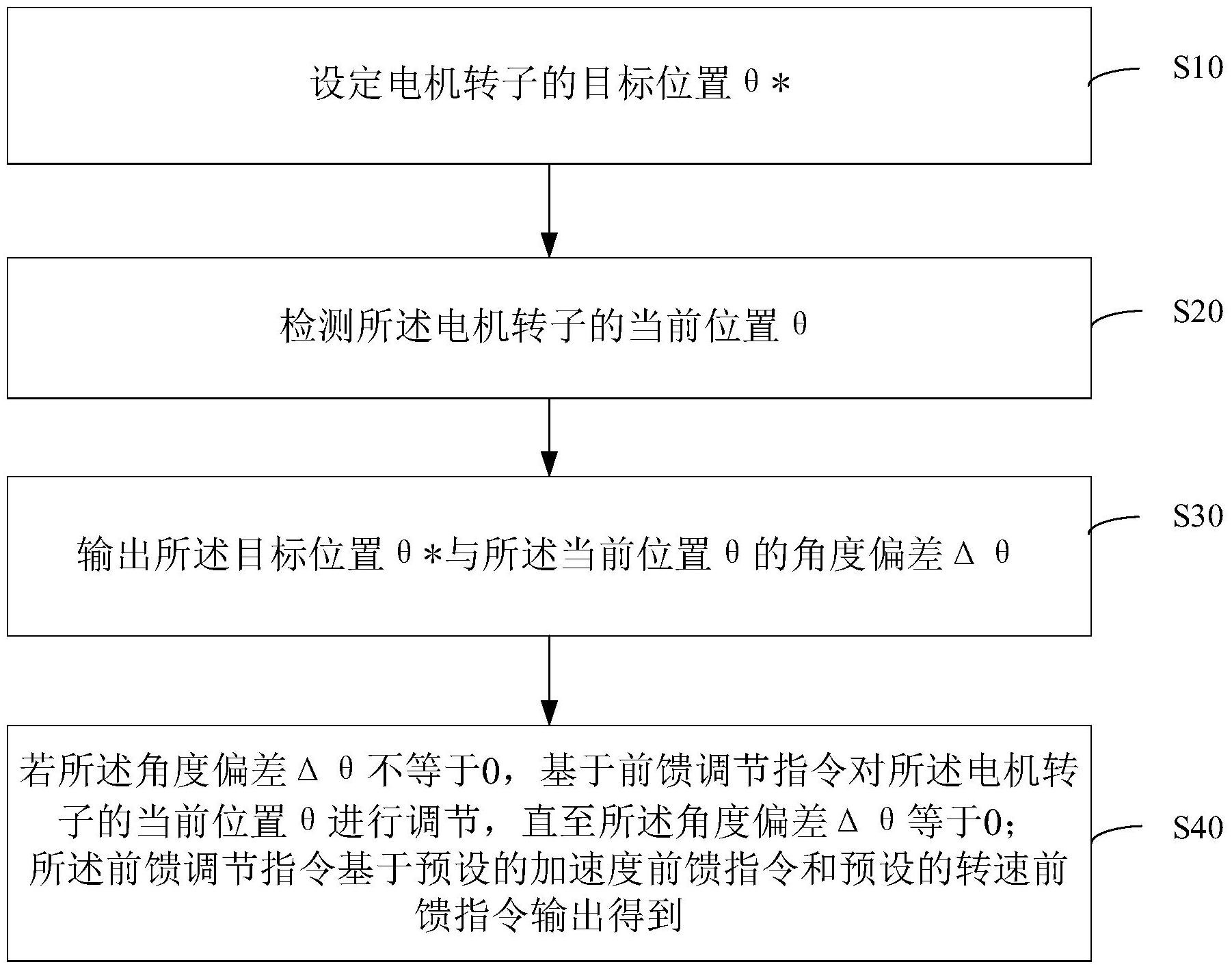
本发明属于电动汽车技术领域,公开了一种电动汽车的驻坡控制方法、系统、装置及计算机可读存储介质,所述一种电动汽车的驻坡控制方法包括:设定电机转子的目标位置θ*;检测所述电机转子的当前位置θ;输出所述目标位置θ*与所述当前位置θ的角度偏差Δθ;若所述角度偏差Δθ不等于0,基于前馈调节指令对所述电机转子的当前位置θ进行调节,直至所述角度偏差Δθ等于0;所述前馈调节指令基于预设的加速度前馈指令和预设的转速前馈指令输出得到。本发明通过可以将前馈调节指令直接给到电流环和速度环,从而大大提高指令跟踪效果,可以保证车辆在驻坡的过程中,既能减少往后溜的距离,又能保证车辆平稳的停下。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有