

授权公布号:CN110614477B
垂直循环立体车库框架焊接定位系统和定位方法
有效
申请
2019-01-15
申请公布
2019-12-27
授权
2023-09-08
预估到期
2039-01-15
| 申请号 | CN201910033980.8 |
| 申请日 | 2019-01-15 |
| 申请公布号 | CN110614477A |
| 申请公布日 | 2019-12-27 |
| 授权公布号 | CN110614477B |
| 授权公告日 | 2023-09-08 |
| 分类号 | B23K37/047 |
| 分类 | 机床;不包含在其他类目中的金属加工; |
| 申请人名称 | 东杰智能科技集团股份有限公司 |
| 申请人地址 | 山西省太原市尖草坪区新兰路51号 |
专利法律状态
2023-09-08
授权
状态信息
授权
2023-08-11
著录事项变更
状态信息
著录事项变更;IPC(主分类):B23K37/047;变更事项:申请人;变更前:山西东杰智能物流装备股份有限公司;变更后:东杰智能科技集团股份有限公司;变更事项:地址;变更前:030008 山西省太原市尖草坪区新兰路51号;变更后:030008 山西省太原市尖草坪区新兰路51号
2020-01-21
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B23K37/047;申请日:20190115
2019-12-27
公布
状态信息
公布
摘要
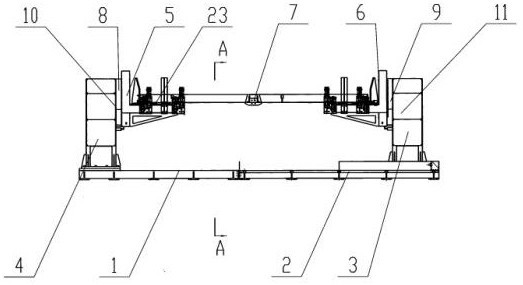
本发明公开了一种垂直循环立体车库框架焊接定位系统及定位方法,解决了现场如何对垂直循环立体车库的主框架进行调整定位以满足焊接机器人的焊接定位精度要求的问题。在左L形翻转台(5)的平台上和右L形翻转台(6)的平台上均分别设置有定位调整万向球(23),在左L形翻转台(5)的平台上和右L形翻转台(6)的平台上均分别设置有缓冲浮动弹簧安装凹槽(26),在缓冲浮动弹簧安装凹槽(26)中设置有缓冲浮动弹簧(25),在缓冲浮动弹簧(25)的顶端设置有浮动万向球(24),焊接框架(7)是设置在定位调整万向球(23)和浮动万向球(24)上的。将传统的滑动摩擦转换成滚动摩擦,大大减轻了调整移动的摩擦阻力。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有