

授权公布号:CN106020187B
一种驾驶入线的方法和装置
有效
申请
2016-05-16
申请公布
2016-10-12
授权
2022-02-22
预估到期
2036-05-16
| 申请号 | CN201610322086.9 |
| 申请日 | 2016-05-16 |
| 申请公布号 | CN106020187A |
| 申请公布日 | 2016-10-12 |
| 授权公布号 | CN106020187B |
| 授权公告日 | 2022-02-22 |
| 分类号 | G05D1/02 |
| 分类 | 控制;调节; |
| 申请人名称 | 北京合众思壮科技股份有限公司 |
| 申请人地址 | 北京市朝阳区酒仙桥路10号恒通商务园B10楼三层 |
专利法律状态
2022-02-22
授权
状态信息
授权
2016-10-12
公布
状态信息
公布
摘要
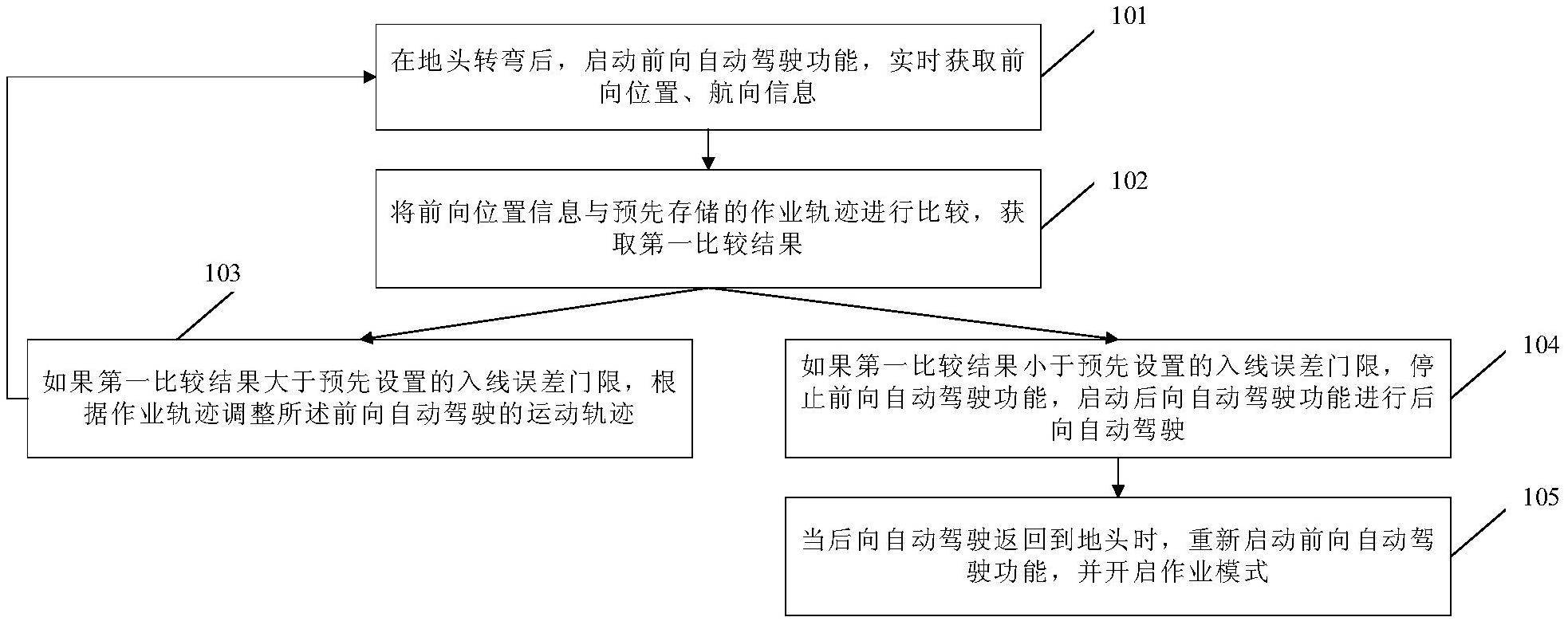
本发明公开一种驾驶入线的方法和装置,涉及自动导航技术。为了解决现有技术入线距离长,从而造成土地资源浪费的问题而发明。技术方案包括:在地头转弯后,启动前向自动驾驶功能,实时获取前向位置、航向信息;将前向位置信息与预先存储的作业轨迹进行比较,获取第一比较结果;如果第一比较结果大于预先设置的入线误差门限,根据作业轨迹调整所述前向自动驾驶的运动轨迹;如果第一比较结果小于预先设置的入线误差门限,停止前向自动驾驶功能,启动后向自动驾驶功能进行后向自动驾驶;当后向自动驾驶返回到所述地头时,重新启动所述前向自动驾驶功能,并开启作业模式。本发明实施例提供的技术方案可以应用农林作业过程中,实现快速入线。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有