

授权公布号:CN113448324B
路径规划方法、装置、电子设备和存储介质
有效
申请
2020-03-09
申请公布
2021-09-28
授权
2023-08-04
预估到期
2040-03-09
| 申请号 | CN202010156517.5 |
| 申请日 | 2020-03-09 |
| 申请公布号 | CN113448324A |
| 申请公布日 | 2021-09-28 |
| 授权公布号 | CN113448324B |
| 授权公告日 | 2023-08-04 |
| 分类号 | G05D1/02 |
| 分类 | 控制;调节; |
| 申请人名称 | 北京合众思壮科技股份有限公司 |
| 申请人地址 | 北京市大兴区亦庄经济开发区科创十二街8号 |
专利法律状态
2023-08-04
授权
状态信息
授权
2021-10-22
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G05D1/02;申请日:20200309
2021-09-28
公布
状态信息
公布
摘要
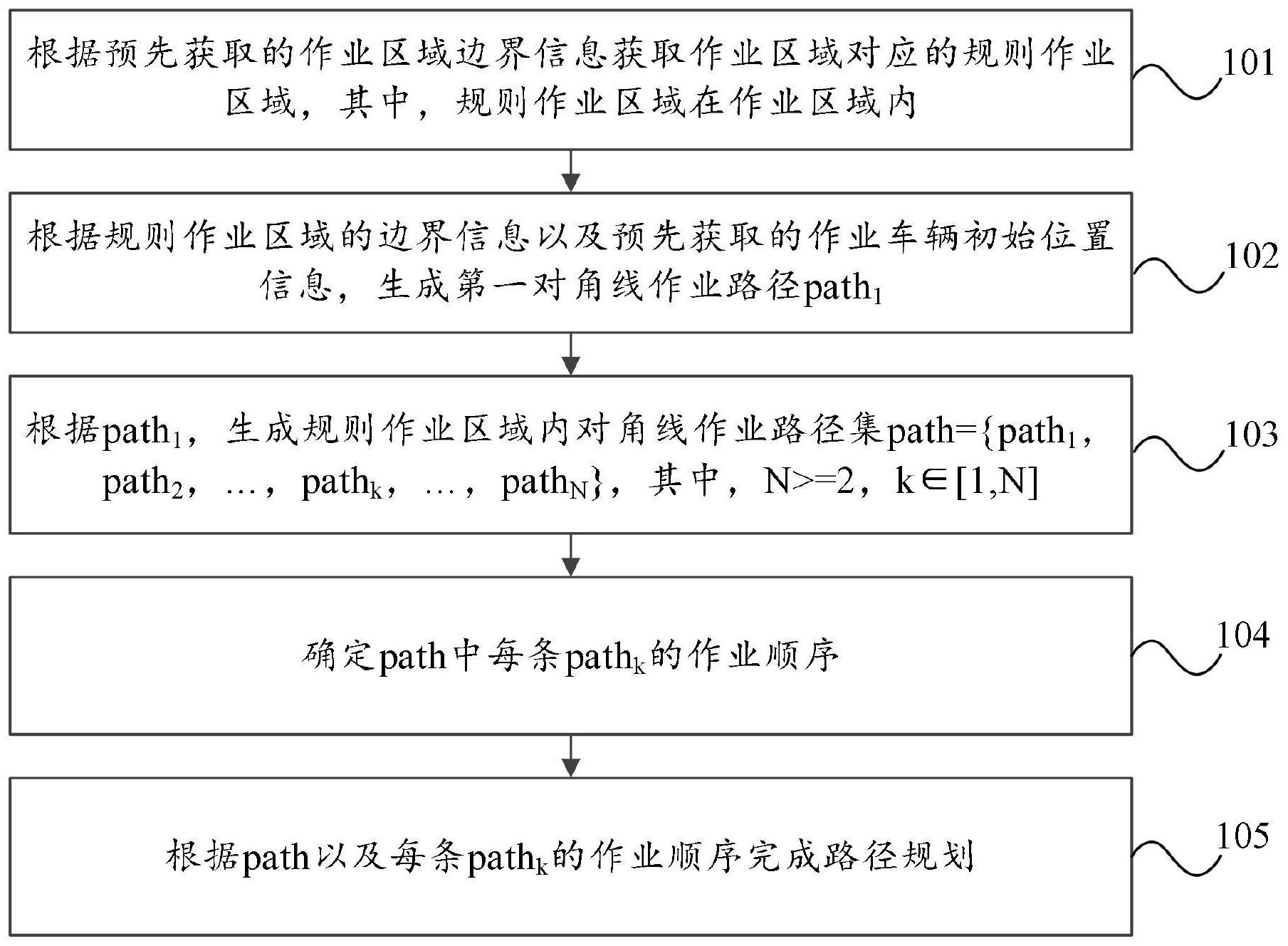
本发明公开了一种路径规划方法、装置、电子设备和存储介质,涉及通信领域,以解决对角线作业效率低、安全性差的问题。包括:根据预先获取的作业区域边界信息获取所述作业区域对应的规则作业区域,规则作业区域在所述作业区域内;根据规则作业区域的边界信息以及预先获取的作业车辆初始位置信息,生成第一对角线作业路径path1;根据path1,生成规则作业区域内对角线作业路径集path={path1,path2,…,pathk,…,pathN},其中,N>=2,k∈[1,N];确定path中每条pathk的作业顺序;根据path以及每条pathk的作业顺序完成路径规划。本发明实施例提供的技术方案可以应用在自动驾驶过程中实现对角线作业。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有